في هذا المنشور ، نتحرى عن دائرة مصممة لتنفيذ بوابة منزلقة أوتوماتيكية أو إجراء باب ، وتتضمن مجموعة من الميزات على النحو المحدد في الطلب. اقترح الفكرة السيد أندرياس.
المواصفات الفنية
هل يمكنك مساعدتي في تصميم وحدة تحكم بسيطة في البوابة المنزلقة. كيف يمكن أن تعمل مثل هذا ... اضغط على مفتاح وافتح البوابة ، وبعد دقيقة تغلق البوابة مرة أخرى.
إذا كان شخص ما يمر أمام البوابة أثناء الإغلاق ، يتم فتح البوابة مرة أخرى (بمساعدة خلية الأشعة تحت الحمراء ؟؟).
الوصول في النهاية (الإيقاف) أثناء الفتح والإغلاق مصنوع بواسطة مفتاح مغناطيسي أو حد .. لاحظ أن هذا النظام يجب أن يعمل على 24V.
تشكرات،
أندرياس كريستودولو
التصميم
يمكن فهم دائرة التحكم في بوابة الانزلاق الأوتوماتيكية المقترحة كما هو موضح في النقاط التالية:
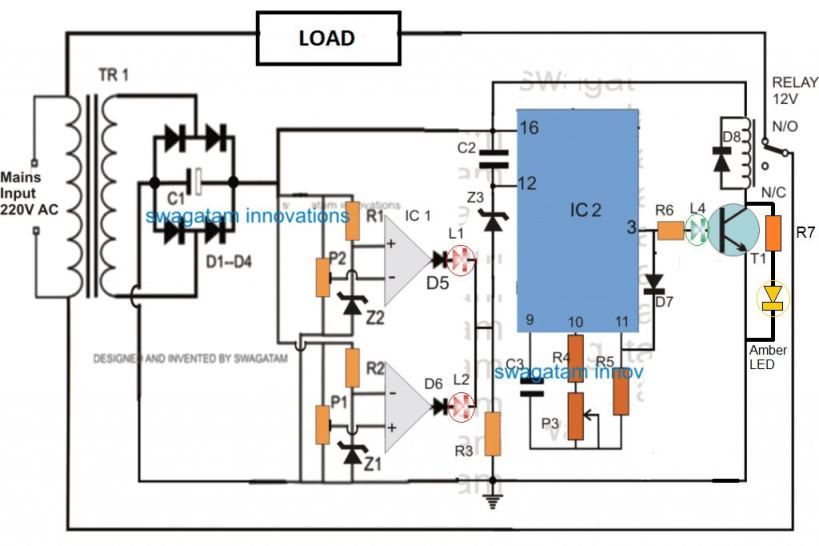
بالإشارة إلى الدائرة أدناه ، يمكن تقسيمها إلى ثلاث مراحل: مزلاج إعادة الضبط باستخدام T1 / T2 ، والمؤقت الأحادي باستخدام IC 4060 ، ومعترض IR باستخدام T3 / T5.

ملحوظة:
- يرجى فصل 100k أسفل C1 من الأرض ، وتوصيله بالطرف الموجب C1 ، مما يعني أنه يجب توصيل 100k عبر أطراف C1 وليس في أي مكان آخر.
- يجب حساب R6 للحصول على تأخير لمدة دقيقة واحدة قبل أن تبدأ البوابة بحركة إغلاق عكسية
لنفترض أن البوابة في الوضع 'مغلق' مع تشغيل Reed # 2 بواسطة مغناطيس البوابة ذي الصلة.
هذا يضمن أن يكون الدبوس رقم 12 في IC 4060 مرتفعًا ويظل IC غير نشط (تم إيقاف تشغيل الدبوس رقم 3).
في السيناريو أعلاه ، يكون المرحل رقم 1 مغلقًا بالفعل ، مع إغلاق موضعه N / C (لأن T1 / T2 معطل) ، و T4 مغلق أيضًا بسبب عدم وجود محرك أقراص أساسي ، مما يعني أن المرحل رقم 2 مغلق وفي وضع N / C.
مع التتابع رقم 2 في N / C ، يتم إيقاف تشغيل المحرك بسبب عدم وجود رابط إيجابي عبر اتصال التتابع رقم 2 N / O.
وبالتالي فإن الدائرة بأكملها في حالة إيقاف التشغيل.
الآن ، كما هو مطلوب ، يتم فتح البوابة بالضغط على SW1 للحظات.
يؤدي الضغط على SW1 على الفور إلى إغلاق T1 / T2 عبر R4 ، وتبديل المرحل رقم 1 بحيث تغلق جهات الاتصال N / O ، مما يجبر المحرك بدوره على تحريك البوابة باتجاه 'الفتح'.
بمجرد انزلاق البوابة بعيدًا عن موضعها 'الإغلاق' ، يتم تحرير القصبة رقم 2 ، والتي تُمكِّن على الفور IC 4060 وتبدأ في العد ، مع رقمها 3 الآن مع منطق صفر.
تتدحرج البوابة حتى تصل إلى النهاية القصوى عندما ينشط المغناطيس الآخر ذي الصلة المثبت على البوابة القصبة رقم 1.
عند التنشيط ، يسحب ريد # 1 قاعدة T1 إلى الأرض عبر C1 ، مما يؤدي إلى كسر المزلاج ، والذي بدوره يلغي تنشيط التتابع رقم 1 وتعود جهات الاتصال الخاصة به إلى نقاط N / C.
ومع ذلك ، لا يزال التتابع رقم 2 في حالة إيقاف التشغيل مما يؤدي إلى توقف المحرك بسبب عدم وجود الطاقة من خلال نقاط الترحيل رقم 2 (N / O).
في غضون ذلك ، يكمل IC 4060 عده مما يسمح للارتفاع بالظهور عند رقمه 3. (يتم تثبيت IC الآن في هذا الموضع عبر D2)
يؤدي هذا على الفور إلى تنشيط الترحيل رقم 2 ، مما يتيح التنشيط العكسي للمحرك.
يبدأ المحرك في تحريك البوابة باتجاه وضع 'الإغلاق' ، وفي اللحظة التي تصل فيها إلى نهاية 'الإغلاق' ، يتم تنشيط القصب رقم 2 مرة أخرى. في هذا الموضع ، يتم إعادة ضبط IC مرة أخرى مما يتسبب في عدم وجود إشارة عند طرفه رقم 3 ، وإلغاء تنشيط التتابع # 2 و .... إيقاف تشغيل المحرك. تعود الدائرة إلى حالة الاستعداد الأصلية.
حساب التأخير الزمني
المعادلة العالمية لإيجاد قيم Rt و Ct لمكون التوقيت هي:
f (osc) = 1 / 2.3 x Rt x Ct
2.3 هو مجرد ثابت فيما يتعلق بالتكوين الداخلي للدوائر المتكاملة.
منع الدخول العرضي
حسب الطلب ، تحتاج الدائرة إلى الاستجابة لدخول عرضي للفرد عبر البوابة أثناء عملية إغلاقها ، وذلك لحماية الفرد وآلية البوابة أيضًا.
يتم تنفيذ ذلك باستخدام مجموعة مستقبل إرسال الأشعة تحت الحمراء ، كما هو موضح في الرسم التخطيطي.
D3 هو ثنائي ضوئي IR للمستقبل يتم تشغيله من خلال حزمة إرسال عمودية تعمل بالأشعة تحت الحمراء ، تركز على D3 ، من المفترض أن يكون موضع الحزمة في خط مستقيم على طول حركة انزلاق البوابة.
طالما بقيت D3 تعمل ، فإن T3 / T5 غير قادر على التصرف ، ولكن في وجود شخص قد يحاول الدخول بسرعة عبر البوابة أثناء إغلاقها ، سيعيق مسار الأشعة تحت الحمراء ، مما يؤدي إلى تشغيل T3 / T5 والذي بدوره سيجري T4 ويعطله ، وترحيل # 2.
مع تعطيل التتابع رقم 2 ، سيتوقف الباب على الفور عن حركة الإغلاق ويتوقف على الفور حتى يتجاوز الفرد خط العمل المقيد تمامًا.
من أجل البساطة ، يبدو التوقف المؤقت للبوابة أكثر ملاءمة ، بدلاً من فرض إجراء فتح عكسي قد يؤخر العملية دون داع.
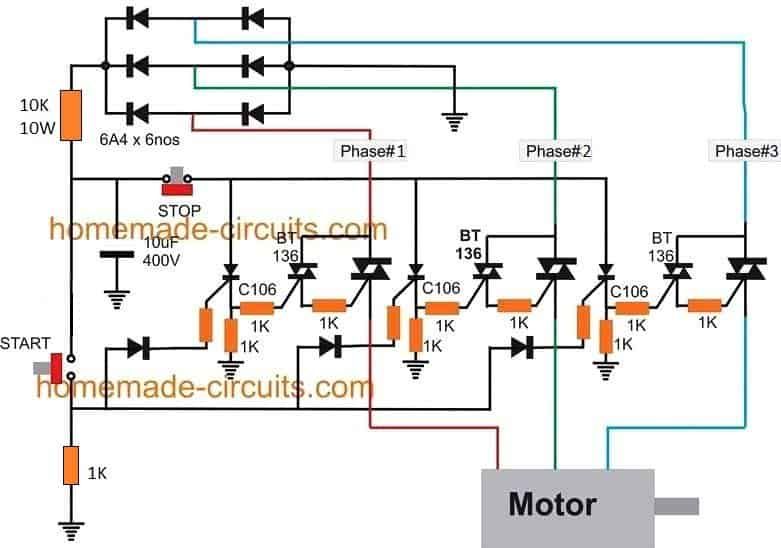
باستخدام مرحلة مؤقت الترانزستور
يمكن تبسيط ما ورد أعلاه كثيرًا عن طريق استبدال مرحلة مؤقت IC 4060 بمؤقت تشغيل ترانزستور تأخير ، وإزالة مرحلة كاشف الأشعة تحت الحمراء. يمكن رؤية مخطط الدائرة الكامل أدناه:

مرحلة مرسل الأشعة تحت الحمراء
يمكن بناء جهاز إرسال الأشعة تحت الحمراء الذي من المفترض أن يركز حزمة على D3 باستخدام الدائرة التالية:

السابق: دائرة مؤشر تشغيل الحمام / المرحاض التلقائي التالي: دائرة الموجة الجيبية PWM (SPWM) باستخدام Opamp