في هذه المقالة نناقش تصميم دائرة سيساعد على تحسين عزم دوران المحرك التعريفي المستخدم في السيارات الكهربائية ، من خلال تحليل استهلاكه الحالي.
استخدام العاكس IC 555 للتحكم في Toque
التصميم مخصص ل سيارة كهربائية التي تم تصميمها للعمل مع المحركات الحثية ، وبالتالي يتم تضمين عاكس لتشغيل المحرك التعريفي من البطارية.
يمكن رؤية دائرة مُحسِّن عزم الدوران التلقائي المقترحة للمحرك التعريفي في الرسم البياني التالي. نظرًا لأنه مصمم لمركبة كهربائية ، فقد تم تضمين دائرة عاكس وتم بناؤها باستخدام IC 555.

يشكل IC 555 جنبًا إلى جنب مع mosfets والمحول المرتبط به أ دارة عاكس لائقة لقيادة المحرك الحثي أحادي الطور المحدد من بطارية 12 فولت أو 24 فولت. بالنسبة لبطارية 24 فولت ، سيحتاج قسم IC إلى التعجيل
وصولا إلى 12V من خلال مرحلة تنظيم الجهد المناسب.
بالعودة إلى التصميم الفعلي ، نحتاج هنا إلى التأكد من أن المحرك الحثي المتصل بالمحول يبدأ بسرعة أقل ويبدأ في اكتساب الزخم والسرعة وعزم الدوران عند تحميله.
استخدام تقنية PWM
لتنفيذ ذلك ، يصبح PWM أفضل تقنية وفي هذا التصميم أيضًا نستفيد من IC 555's المدمج في تحسين PWM خاصية. كما نعلم جميعًا أن الدبوس رقم 5 في IC 555 يشكل جهد التحكم
مدخلات IC ، والتي تستجيب لجهد متغير لضبط مستوى عرض النبضة عند الطرف رقم 3 ، مما يعني أنه بالنسبة للمستويات المحتملة الأعلى عند الطرف رقم 5 ، يصبح عرض النبض عند الطرف رقم 3 أوسع ولإمكانات أقل عند الطرف رقم 5 ، عرض النبض في الطرف رقم 3 يضيق.
من أجل ترجمة مواصفات الحمل إلى جهد متغير عند الطرف رقم 5 ، نحتاج إلى مرحلة دارة قادرة على تحويل الحمل المتزايد على المحرك التعريفي إلى جهد مرتفع نسبيًا
الفرق في دبوس رقم 5 من IC 555
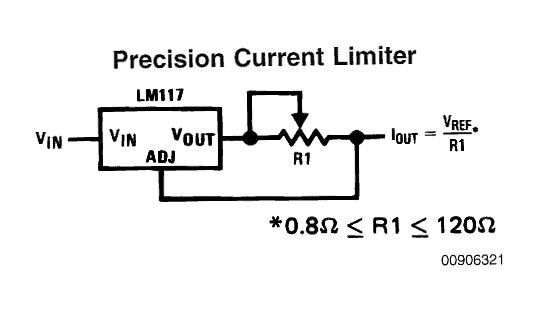
دور مستشعر الحد الحالي
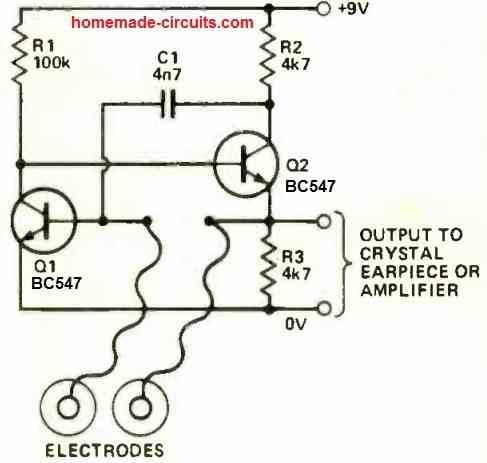
يتم ذلك عن طريق تقديم ملف المقاوم الاستشعار الحالي آر إكس ، والذي يحول التيار المتصاعد الذي يجذبه الحمل إلى فرق جهد مرتفع نسبيًا عبر نفسه.
يتم استشعار هذا الاختلاف في الجهد بواسطة BC547 ونقل البيانات إلى LED المتصل ، وهو في الواقع مؤشر LED داخل مقرنة بصرية LED / LDR صنع يدويًا في المنزل.
مع زيادة سطوع LED استجابةً لارتفاع الاستهلاك الحالي من خلال الحمل المرفق ، تنخفض مقاومة LDR بشكل متناسب.
يمكن رؤية LDR يشكل جزءًا من شبكة المقسم المحتملة عبر مدخلات Opamp غير المقلوبة ، لذلك عندما تنخفض مقاومة LDR ، ترتفع الإمكانات عند الدبوس رقم 3 من opamp ، مما يؤدي بدوره إلى ارتفاع الجهد المقابل عند الإخراج من opamp.
يحدث هذا بسبب تكوين opamp كدائرة تابعة للجهد ، مما يعني أن بيانات الجهد عند الطرف رقم 3 سيتم نسخها تمامًا عند طرف الخرج رقم 6 وبطريقة مضخمة.
هذا الجهد المرتفع المقابل في الدبوس رقم 6 من opamp استجابة للحمل المتزايد على المحرك التعريفي يغذي إمكانات متزايدة عند الطرف رقم 5 من IC555. وهذا بدوره يتسبب في أن يصبح PWM الأولي الأضيق عند الطرف رقم 3 من IC 555 أوسع.
عندما يحدث هذا ، تبدأ موسفيت العاكس في توصيل المزيد من التيار إلى المحول مما يتيح طاقة أعلى نسبيًا للمحرك التعريفي ، وتتيح العملية للحمل العمل بمزيد من الطاقة وبأقصى قدر
أداء.
على العكس من ذلك ، بمجرد تقليل الحمل ، يتم أيضًا تقليل التيار عبر Rx مما يقلل من سطوع LED ، وتنخفض إمكانات خرج opamps في المقابل ، مما يؤدي أخيرًا إلى تضييق IC 555 لـ PWM الخاص بـ mosfets وتقليل إدخال الطاقة إلى المحولات.
استخدام مُحسِّن عزم الدوران لمحركات جهاز المشي
دائرة مُحسِّن عزم الدوران الموضحة أعلاه للمحركات الحثية مخصصة للسيارات الكهربائية ، ولكن إذا كنت مهتمًا بتشغيل محرك تيار مستمر عادي عالي الطاقة مثل محرك فقي محرك مطحنة ، في هذه الحالة يمكن ببساطة التخلص من قسم المحولات ، ويمكن توصيل المحرك مباشرة كما هو موضح في الرسم البياني التالي:

أنا متأكد من أنه سيكون لديك العديد من الأسئلة المعنية ، لذا لا تتردد في طرحها من خلال تعليقاتك القيمة. سيتم الرد على جميع استفساراتك ذات الصلة في أقرب وقت ممكن
زوج من: SG3525 Full Bridge Inverter Circuit التالي: 10 حلبة تبديل مزلاج متتابعة