
عادةً ما تستخدم روبوتات التحكم عن بعد دوائر التردد اللاسلكي ، التي لها عيوب نطاق العمل المحدود والتحكم المحدود ونطاق التردد المحدود. للتغلب على هذه العيوب ، تعمل الهواتف المحمولة لاند روفر يتم استخدام مركبة آلية. إنه يوفر مزايا التحكم الآلي ، وأجهزة التحكم الخالية من التطفل وما يصل إلى اثني عشر نظام تحكم ، إلخ.
على الرغم من قدرات ومظهر الروبوتات المدمجة تختلف اختلافًا كبيرًا ، فجميع الروبوتات تشترك في ميزات الهيكل الميكانيكي المتحرك تحت شكل من أشكال التحكم. يتضمن التحكم في الروبوتات ثلاث مراحل مختلفة هي الإدراك والمعالجة والعمل. عادة ، يتم تثبيت المستشعرات على الروبوت. يتم الإدراك والمعالجة بواسطة متحكم دقيق على متن الطائرة ، ويتم تنفيذ الإجراء باستخدام المحركات.
سيارة لاند روفر روبوتية تعمل بالهاتف الخلوي

هاتف محمول يتم تشغيله بواسطة سيارة لاند روفر الروبوتية من قبل Edgefxkits.com
الهدف الرئيسي من هذا المشروع هو التحكم في ذراع آلية مثبتة على مركبة آلية باستخدام الهاتف المحمول. يوفر نطاق عمل كبير وتحكمًا قويًا وما إلى ذلك.
رسم تخطيطي لمركبة لاند روفر الروبوتية التي تعمل بالهاتف الخلوي:

رسم تخطيطي للهاتف الخليوي العامل لاند رو Operر
اللبنات الأساسية هي المتحكم الدقيق ، والهاتف المحمول ، وفك الشفرة DTMF ، ودائرة السائق بمحرك DC. الهاتف المحمول هو أهم جزء في النظام بأكمله لأن النظام بأكمله يعمل ويتم تنشيطه بواسطة الهاتف المحمول. DTMF (تردد متعدد النغمات) يستقبل إشارة الإدخال من الهاتف الخلوي ويفك تشفيرها ، ثم يولد إخراجًا رقميًا 4 بت من 8051 متحكم . عندما يعطي مفكك الشفرة DTMF إخراجًا رقميًا ، فإنه يولد أيضًا مقاطعة في كل مرة.
المتحكم الدقيق هو قلب النظام بأكمله لأنه يقوم بإجراءات التحكم بأكملها. يعتمد المتحكم الدقيق على الكود الذي تم إنشاؤه بواسطة وحدة فك الشفرة DTMF لتحريك العربة الجوالة يمينًا أو يسارًا وللأمام أو للخلف عن طريق تدوير كلا محركي التيار المستمر. يستقبل محرك DC إشارات تنشيط من المتحكم الدقيق من حيث المنطق المنخفض أو العالي ، ثم يقوم بتضخيم محركين وتدويرهما في كلا الاتجاهين.
يتضمن التحكم في الروبوت بشكل أساسي أربع مراحل مختلفة: الإدراك ومعالجة العمل والكشف. في مرحلة الإدراك ، إذا تلقى الهاتف المحمول المتصل بالروبوت مكالمة ، فإن الضغط على المفتاح الموجود على الهاتف المحمول يفك تشفير نغمة DTMF التي تم إنشاؤها. بعد ذلك ، تستقبل شريحة وحدة فك التشفير الإشارة الصوتية من الهاتف المحمول ، ثم تقوم بتحويل نغمة DTMF إلى رمز ثنائي ، يتم تغذيته بعد ذلك إلى وحدة التحكم الدقيقة. في هذا المشروع ، يتم استخدام MT88710 IC كوحدة فك ترميز DTMF. في مرحلة المعالجة ، يقوم المتحكم الدقيق بمعالجة الكود الثنائي الذي يتم استلامه من وحدة فك ترميز DTMF. ال المتحكم الدقيق مبرمج مسبقًا في 'C' لأداء هذه المهمة الخاصة وفقًا لبتات الإدخال.
في مرحلة الحركة ، يعتمد دوران المحركات على المدخلات التي يقدمها الميكروكونترولر. يتم استخدام محركي تيار مستمر كل منهما 30 دورة في الدقيقة في لاندروفر ويتم تشغيلهما بواسطة محرك IC للسائق. عند الكشف عن المرحلة ، وكشف العوائق ، أ جهاز إرسال واستقبال الأشعة تحت الحمراء تستخدم مع الجرس. عندما يأتي العائق أمام الروبوت ، يرسل مرسل IR أشعة IR على الكائن ، ثم يعكس الكائن أشعة IR إلى مستقبل الأشعة تحت الحمراء. ثم يستقبل مستقبل الأشعة تحت الحمراء الأشعة تحت الحمراء لتنشيط الجرس.
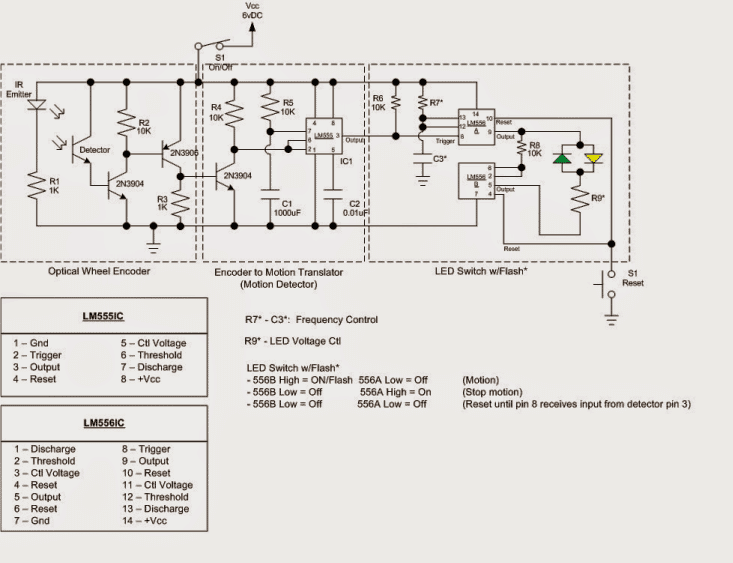
مخطط الدائرة لمركبة لاند روفر الروبوتية التي تعمل بالهاتف الخلوي:
المكونات الرئيسية لهذا لاندروفر الروبوتية التي يتم تشغيلها بواسطة الهاتف المحمول هي متحكم دقيق ، ومحرك محرك ، وفك تشفير DTMF. يتم استخدام وحدة فك ترميز DTMF من سلسلة MT8870 في هذا المشروع الذي يستخدم تقنيات العد الرقمي لاكتشاف أزواج نغمات DTMF 16 في إخراج كود 4 بت. تعمل دائرة نغمة الطلب المدمجة على التخلص من التصفية المسبقة. إذا تم إعطاء إشارة دخل في pin2 ، فسيتم التعرف على تكوين الإدخال ليكون فعالاً. يتم نقل إشارة فك تشفير 4 بت من نغمة DTMF إلى pin11 من خلال إخراج دبوس 14. هذه المسامير متصلة بدبابيس متحكم Pao و Pa1 و Pa2 و Pa3. يتم تغذية خرج الميكروكونترولر من دبابيس المنفذ PD0 حتى PD3 و PD7 إلى المدخلات IN1 و IN4 وتمكين المسامير EN1 و EN2 لمحرك المحرك L293D IC قيادة اثنين من محركات التيار المستمر .

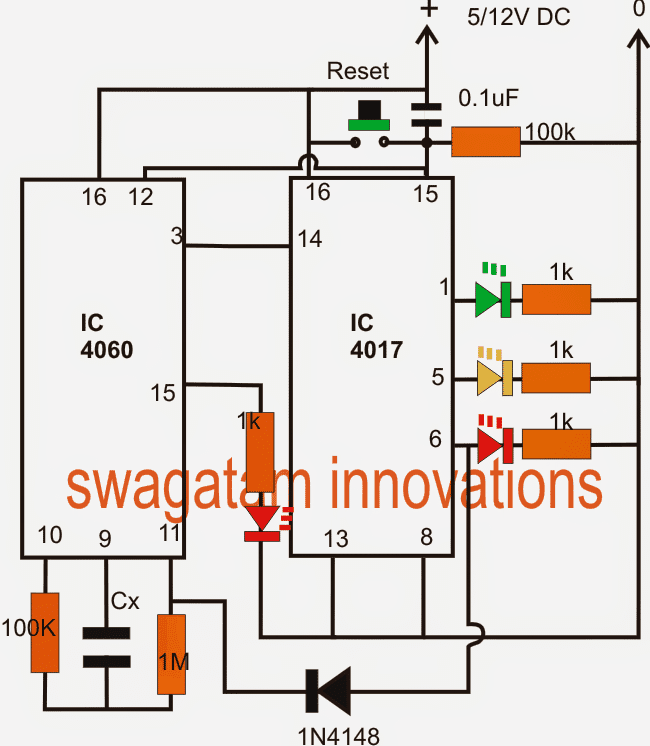
رسم تخطيطي لدائرة الهاتف المحمول لاند روفر
في هذه الدائرة ، يتم استخدام مفتاح S1 لإعادة الضبط اليدوي. لا يكفي ناتج وحدة التحكم الدقيقة لتشغيل محركات التيار المستمر ، لذلك فإن المحركات الحالية ضرورية لدوران المحرك ، وقد تم تصميم محرك L293D لتوفير تيارات محرك ثنائية الاتجاه تصل إلى 600 مللي أمبير عند الفولتية من 4.5 فولت إلى 36 فولت ، مما يجعلها أسهل لقيادة محركات التيار المستمر. يتكون سائق المحرك L293D من أربعة سائقين. المسامير من IN1 إلى IN4 & OUT1 و OUT4 هي دبابيس الإدخال والإخراج لبرنامج التشغيل من 1 إلى برنامج التشغيل 4. يتم تمكين برامج التشغيل 1،2،3 و 4 بواسطة طرف التمكين 1 (EN1) والدبوس 9 (EN2). عند تمكين الإدخال EN1 (pin1) مرتفعًا ، يتم تمكين السائقين 1 و 2. وبالمثل ، فإن إدخال التمكين EN2 (pin9) يمكّن السائقين 3.
المميزات والعيوب:
تشمل مزايا لاندروفر الروبوتية التي تعمل بالهاتف الخلوي توفير التحكم اللاسلكي ونظام المراقبة ونظام الملاحة في السيارة القائم على تقنية الجيل الثالث ونطاق تشغيلي غير محدود يعتمد على شبكة الهاتف المحمول. العيب ما يلي: التكلفة حيث أن فواتير الهاتف المحمول مرتفعة تفريغ بطاريات المحمول : مشكلة التفريغ المصاحبة للبطاريات حيث تفقد البطاريات الشحن بسبب التفريغ السريع لأن الحمولة عالية القدرة على التكيف: النظام غير قابل للتكيف مع جميع الهواتف المحمولة ، ولكن لا يمكن استخدام تلك المرفقة بسماعة الرأس إلا.
وبالتالي ، فإن مشروع الروبوت الذي يعمل بالهاتف المحمول مفيد جدًا في التطبيقات العسكرية للتحكم في المركبات العسكرية باستخدام الهاتف المحمول. في المستقبل ، يمكننا اكتشاف مواقع الأعداء من خلال ترتيب كاميرا لاسلكية لسيارة لاند روفر الروبوتية. يمكن أن يكون هذا المشروع مفيدًا أيضًا في الأكاديميين حيث يمكن للطلاب تعلم العديد من المصطلحات والمبادئ المقترحة في هذا المشروع. سيساعد هذا المشروع الطلاب على إضافة أفكارهم وأفكارهم المبتكرة إلى تطوير مشاريع الروبوتات .
اعتمادات الصورة:
- الهاتف الخليوي تعمل لاند روفر من قبل سانتوشبانيسيتي
- رسم تخطيطي لدائرة الهاتف الخلوي التي تعمل بها شركة لاند روفر المهندسين المرآب








{kind=link}