جهاز تغذية الكلاب الذي يتم التحكم فيه بواسطة الهاتف المحمول هو نظام تغذية للحيوانات الأليفة والحيوانات يسمح بإعادة تعبئة الطعام عن بعد في حاوية وحدة التغذية من قبل المالك ، دون حضور المكان فعليًا.
تمت مناقشة وحدة GSM ودائرة تغذية الكلاب القائمة على Arduino في هذا المنشور. يمكن استخدام النظام لتشغيل آلية تغذية الكلاب من خلال الهاتف المحمول للمالك كلما لزم الأمر.

تم طلب الفكرة من قبل السيد آلان غييرمو من خلال أحد شركائه تعليقات
مقدمة
على الرغم من أن جميع أنواع الحيوانات الأليفة محبوبة ، إلا أن الكلاب تميل إلى الحصول على تفضيل أعلى كحيوانات أليفة ، ربما بسبب مستوى ذكائها العالي وولائها تجاه المالك.
ومع ذلك ، مع جداول الأعمال المحمومة المتزايدة اليوم ، يواجه العديد من أصحاب الحيوانات الأليفة مشاكل كبيرة في إدارة حيواناتهم الأليفة أثناء ساعات عملهم.
تصبح إطعام حيوان أليف في الوقت المحدد مشكلة رئيسية لجميع أصحاب الحيوانات الأليفة المشغولين. غالبًا ما يبحث أصحاب الحيوانات الأليفة عن حل ممكن يضمن عدم إجبار حيواناتهم الأليفة على البقاء جائعًا أو المرور بأنماط غذائية غير مناسبة.
لحل هذه المشكلة ، قد توفر الفكرة التي تمت مناقشتها هنا الحل المطلوب بشدة لكل شخص يواجه الاهتمام المذكور أعلاه.
هدف
الهدف من الدائرة هو تمكين المستخدم من معرفة متى يكون الطعام في الحاوية فارغًا ، وإعادة ملئه بمكالمة سريعة من هاتفه المحمول.
مع هذا المرفق ، لن يضطر أصحاب الحيوانات الأليفة للقلق أبدًا بشأن توفير الطعام لحيواناتهم الأليفة في الوقت المناسب حتى أثناء تواجدهم بعيدًا عن المنزل.
باستخدام نظام اردوينو GSM
في هذا المفهوم ، أ وحدة GSM يستخدم كجهاز استقبال يقبل أمرًا من الهاتف المحمول المالك لتنفيذ عملية عملية ، وكذلك يرسل رسالة نصية قصيرة كلما تم الكشف عن المشكلة ذات الصلة.
سنحتاج إلى الوحدات التالية لبناء النظام:
1) وحدة GSM
2) لوحة اردوينو
3) عدد قليل من قطع الغيار الإلكترونية
4) آلية المحرك
مخطط الرسم البياني

جعل مرحلة استقبال GSM
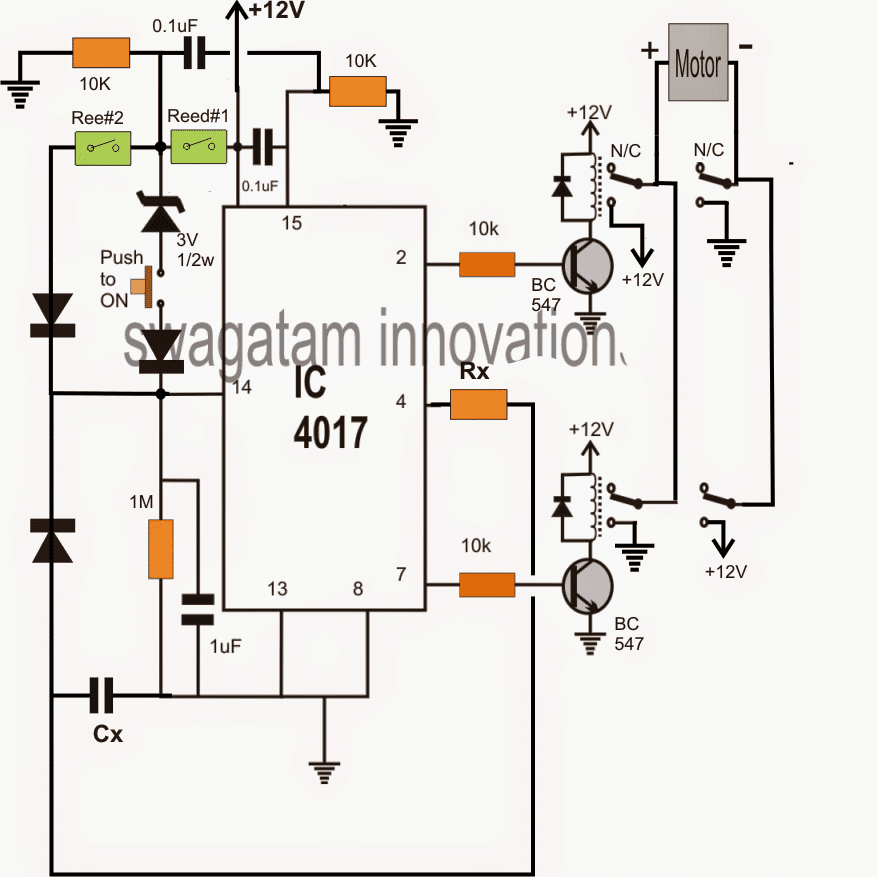
يوضح الرسم البياني أعلاه دائرة مستقبل GSM ، باستخدام وحدة GSM و لوحة اردوينو UNO.
وظيفة هذا التصميم هي تلقي الأمر من الهاتف المحمول المالكين و تشغيل التتابع المرفق.
يقوم المرحل أخيرًا بتبديل آلية المحرك أو الملف اللولبي لتنفيذ عملية تغذية الكلاب المقصودة.
يبدو الإعداد مفهومًا تمامًا ، باستثناء تضمين تتابع القصب.
يتم إدخال مرحل القصب لاستشعار وجود أو عدم وجود طعام للكلاب في الحاوية المحددة.
كيف يُفترض أن يتم ترتيب Reed Relay
يتم استخدام مرحل القصب لتشغيل إشارة + 5V (عالية) أو 0V (LOW) للدبوس # 7 من Arduino. ثم تطالب هذه الإشارة Arduino بإرسال رسالة نصية إلى الهاتف المحمول للمالك ، من خلال وحدة GSM.
وبذلك يصبح المالك على علم بحالة الطعام الموجود في الحاوية ، سواء أكان مملوءًا أم فارغًا. وفقًا لهذا الموقف ، يرسل المالك بسرعة أمرًا إلى وحدة GSM عبر هاتفه المحمول لتشغيل نظام التغذية ، بحيث يملأ الحاوية مرة أخرى بالطعام.
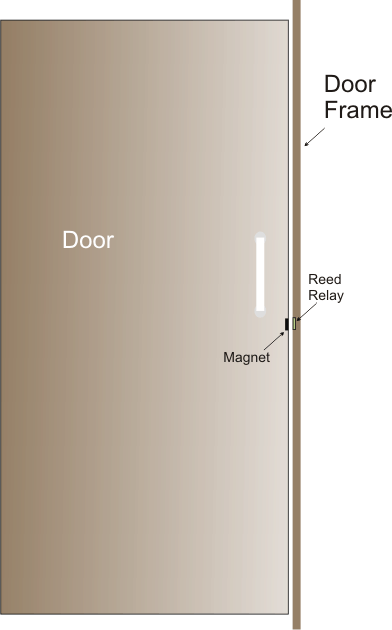
لتمكين مرحل القصب من العمل ، ستحتاج حاوية طعام الكلاب إلى تعديل بحيث تميل لأسفل أو تضغط لأسفل بحوالي سم عند تحميلها بالطعام. ويتحرك لأعلى أو يميل في حالة عدم وجود حمولة أو طعام.
يأتي مغناطيس صغير يتم إدخاله على الجانب المائل بالقرب من مرحل القصب عندما يتم تحميل الحاوية ويتحرك بعيدًا عندما تكون الحاوية فارغة.
اعتمادًا على المواقف المذكورة أعلاه ، يرسل مرحل القصب إشارة موجبة أو سلبية إلى الدبوس رقم 7 في Arduino ، مما يطالبه بإرسال رسالة نصية إلى المالك.
كيف يمكن أن تعمل آلية المحرك
يمكن ترتيب آلية المحرك بحيث يفتح باب المغذي عند تنشيطه عن طريق دفع آلية محملة بنابض.
خلال هذا الوقت ، يبدأ وعاء التغذية بالملء ويؤدي وزنه في النهاية إلى إرسال تتابع القصب إشارة إيجابية إلى Arduino.
عندما يحدث هذا ، يُطلب من المالك سريعًا برسالة نصية تعترف بملء حاوية الطعام.
في هذه المرحلة ، يتعين على المستخدم إرسال مكالمة أخرى إلى Arduino GSM ، بحيث يعود الملف اللولبي أو آلية المحرك إلى حالته الأصلية ويغلق باب وحدة التغذية.
يمكن تخصيص آلية المحرك الموضحة أعلاه وترتيب مرحل القصب بعدة طرق مختلفة حسب راحة المستخدم وملاءمته.
كود البرنامج:
رمز البرنامج هو نفسه كما هو موضح في المقالة التالية.
الرجاء استخدام الكود الموضح في الجزء السفلي من المقالة التالية ، وليس القسم الأول.
https://www.elprocus.com/2016/11/gsm-pump-motor-controller-using-arduino.html
السابق: تعلم برمجة Arduino الأساسية - برنامج تعليمي للقادمين الجدد التالي: أساسيات التعلم لأشباه الموصلات