يشرح المنشور طريقة يمكن استخدامها على الأرجح لتعزيز قدرة مستشعر الأشعة تحت الحمراء السلبية لاكتشاف حتى التواجد البشري الثابت أو الثابت. هذه الميزة غير ممكنة عادةً مع مستشعرات PIR التقليدية.
كيف يكتشف PIR الوجود البشري
لقد ناقشت بالفعل العديد من تطبيقات كاشف الحركة القائمة على PIR في هذا الموقع ، ولكن كل هذه التطبيقات تتطلب أن يكون الوجود البشري في حالة حركة مستمرة من أجل الحفاظ على اكتشاف PIR لوجودهم ، ويبدو أن هذا يمثل عيبًا كبيرًا يمنع هذه الوحدات من الاستشعار شغل بشري ثابت أو ثابت.
ومع ذلك فإن العيب الموضح أعلاه له سبب وراءه. تعمل مستشعرات PIR التقليدية من خلال استشعار إشارات الأشعة تحت الحمراء من جسم الإنسان من خلال فتحتين متوازيتين على العدسة الأمامية ، وتنشط دائرتها الداخلية فقط عندما تعبر إشارات الأشعة تحت الحمراء بين فتحات الاستشعار هذه ('الرؤى').
يتيح عبور إشارات الأشعة تحت الحمراء عبر فتحات الاستشعار لدائرة PIR ترجمة المعلومات إلى نبضتين متناوبتين ، والتي يتم تصحيحها بدورها لتوليد جهد التشغيل عند الطرف الخارجي لـ PIR.
لا يمكن لـ PIR الكشف عن هدف القرطاسية
هذا يعني أنه إذا كان مصدر الأشعة تحت الحمراء ثابتًا ، فلن يطالب وحدة PIR بإنتاج أي مشغل عبر طرف الإخراج الخاص بها. كما يعني أيضًا أن إشارة الأشعة تحت الحمراء من المصدر يجب أن تستمر بطريقة ما في العبور عبر فتحات الكشف عن PIR المعينة من أجل تمكينها من الإحساس بشخص معين داخل المنطقة.
يبدو أنه لا يوجد علاج مباشر أو بسيط لهذا ، لأنه لا يمكن تعديل وحدات PIR داخليًا لهذا ، مما يعوق الوحدة عن اكتشاف التواجد البشري الثابت.
ومع ذلك ، تخبرنا الملاحظة المنطقية أنه إذا كان مصدر الأشعة تحت الحمراء المتغير الذي قد يكون مطلوبًا للحفاظ على تنشيط وحدة PIR ، فلماذا لا تجبر PIR نفسه على أن يكون في حركة ثابتة بدلاً من الموضوع.
يمكن تصور المفهوم من محاكاة GIF التالية ، والتي تُظهر وحدة PIR متذبذبة وإنسانًا ثابتًا في منطقة الكشف.

هنا يمكننا أن نرى كيف يتكيف PIR المتأرجح مع المشكلة ويحول نفسه مما يتيح اكتشاف حتى موضوعات الأشعة تحت الحمراء الثابتة.
يصبح هذا ممكنًا لأنه من خلال حركتها ، تقوم وحدة PIR بتحويل مصدر IR الثابت إلى تصوير IR متغير باستمرار عبر فتحات الاستقبال الخاصة به.
على الرغم من أن الفكرة تبدو معقدة ، إلا أنه يمكن حلها في الواقع باستخدام دائرة محرك PwM تتأرجح ببطء.
سنتعرف على الآلية بالكامل وتفاصيل الدائرة في الأقسام التالية.
كما ناقشنا بالفعل ، فإن وحدات PIR التقليدية قادرة على اكتشاف الكائنات الحية المتحركة فقط ولا يمكنها تحديد هدف ثابت مما يجعل تطبيقه محدودًا ككاشف للحركة البشرية فقط.
بالنسبة للتطبيقات التي يصبح فيها اكتشاف الإشغال البشري غير المتحرك ضروريًا في مثل هذه السيناريوهات ، يمكن أن يصبح PIR التقليدي عديم الفائدة ، وقد يتطلب بعض الترتيبات الخارجية لترقية نفسه.
تصميم PIR لاكتشاف الأهداف عديمة الحركة
في القسم أعلاه ، تعلمنا أنه بدلاً من الحاجة إلى أن يكون الهدف متحركًا ، يمكن نقل وحدة PIR نفسها فوق نصف قطر معين لتنفيذ الكشف عن الهدف الثابت المطلوب.
في الأقسام التالية نتعلم فيما يتعلق بآلية دائرة بسيطة يمكن استخدامها مع PIR مركب فوق محرك DC صغير للتذبذبات المقترحة.
برنامج تشغيل المحرك المتحكم فيه PWM / Flip Flop
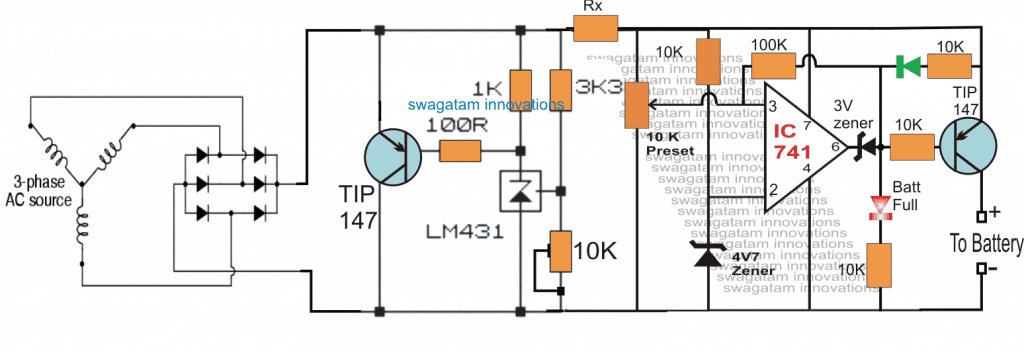
يتطلب النظام أساسًا تحديد السرعة المتحكم فيه بواسطة PWM وتغيير الوجه بالتخبط للمحرك. يوضح الرسم البياني التالي كيف يمكن أن تُنسب هذه الميزات إلى محرك PIR بمساعدة دائرة بسيطة:

الدائرة الموضحة تستخدم بوابة IC واحدة عرافة IC HEF40106 عرافة IC والتي تشتمل على 6 بوابات غير عاكسة.
تم تكوين البوابات N1 و N2 لإنتاج خرج PWM قابل للتعديل يتم تغذيته بالبوابات N4 و N5 و N6 لتشكيل المخازن المؤقتة.
يتم إنهاء الإخراج المشترك من هذه البوابات العازلة لبوابة سائق المحرك mosfet.
يتم ضبط محتوى PWM بمساعدة P1 ، والذي يتم تطبيقه أخيرًا على المحرك المتصل عبر مجموعة من جهات اتصال الترحيل DPDT.
تحدد ملامسات الترحيل هذه اتجاه حركة المحرك (في اتجاه عقارب الساعة أو عكس اتجاه عقارب الساعة).
يتم التحكم في ملامسات مرحل DPDT المتقلب هذه بواسطة مؤقت ثابت تم تكوينه حول البوابة N3 ، حيث يحدد المكثف C3 / R3 المعدل الذي يحتاجه المرحل للتبديل من أجل السماح للمحرك بتغيير اتجاه دورانه باستمرار.
يسمح التصميم أعلاه للمحرك بتنفيذ الحركة المتذبذبة البطيئة جيئة وذهابا عبر منطقة شعاعية معينة.
يمكن اختيار C3 لبدء التغيير بعد كل 5 إلى 6 ثوانٍ ، ويمكن تعديل PWm لتمكين حركة محرك بطيئة للغاية ، لأنه يحتاج فقط إلى التأكد من أن فتحات PIR تتقاطع مع إشارات الأشعة تحت الحمراء للهدف في الوقت المناسب.
ومع ذلك ، نظرًا لأن تشغيل المحرك بطيء ، فإن الإخراج من PIR يجب أن يستمر من خلال مؤقت إيقاف التشغيل المؤقت بحيث لا يتم إيقاف تشغيل الحمل المتصل وتشغيله بينما تخترق حركة المحرك خطوط الأشعة تحت الحمراء بالتناوب من الإشغال البشري.
مؤقت التأخير
الأتى تأخير مرحلة الدائرة الموقت يمكن استخدامه للتأكد من أنه في كل مرة ينتج فيها خرج PIR النبضة المحسوسة ، يتم تمديد التأخير من المؤقت لمدة 5 إلى 10 ثوانٍ ولا يتم قطع الحمل المتصل أبدًا أثناء العملية.

في الإعداد أعلاه ، يمكننا أن نرى المحرك الذي يتلقى إمداد محركه الكهربائي من مرحلة PWM / flip flop كما تمت مناقشته في الفقرة السابقة.
يمكن رؤية محور دوران المحرك مقترنًا بعمود أفقي يتم تثبيت PIR فوقه ، بحيث أنه عندما يتحرك المحرك ، يمر PIR بحركة شعاعية متغيرة بشكل مماثل إلى جيئة وذهابا.
أثناء استحثاث حركة PIR أعلاه ، يتم اكتشاف إشارات الأشعة تحت الحمراء من هدف ثابت في المنطقة على شكل نبضات بديلة قصيرة ، والتي يتم إنشاؤها عند طرف خرج PIR المشار إليه بالسلك الأزرق.
يتم تطبيق هذه النبضات عبر مكثف 1000 فائق التوهج والذي يتم شحنه مع كل نبضة ويتأكد من بقاء BC547 في وضع التوصيل دون انقطاع أثناء العملية.
يستجيب محرك الترحيل الذي يتكون من مرحلة BC557 للإشارة المستقرة المذكورة أعلاه من المجمع BC547 وبدوره يحافظ على المرحل قيد التشغيل ، طالما أن PIR يواصل اكتشاف وجود بشري.
وبالتالي ، يظل حمل الترحيل نشطًا بشكل مستمر بسبب وجود إنسان ثابت في المنطقة.
ومع ذلك ، في حالة إزالة الإشغال البشري أو عندما يتحرك الهدف بعيدًا عن المنطقة ، فإن مرحلة مؤقت التأخير تحافظ على المرحل والحمل مفعلًا لمدة 5 إلى 10 ثوانٍ بعد ذلك يتم إيقافها بشكل دائم ، حتى يتم التقاط المنطقة مرة أخرى من خلال مصدر محتمل منبع IR.
قائمة الاجزاء
- م 1 ، م 4 = 10 ك
- R2 = 47 أوم
- P1 = 100 ألف وعاء
- D1 ، D2 = 1N4148
- D3 = MUR1560
- C1 ، C2 = 0.1 فائق التوهج / 100 فولت
- Z1 = 15 فولت ، 1/2 واط
- س 1 = IRF540
- Q2 = BC547
- N1 - N6 = IC MM74C14
- DPDT = مفتاح DPST أو مرحل DPDT
- يتم تحديد R3 و C3 عن طريق بعض التجارب والخطأ
تحديث:
يمكن تبسيط دائرة PIR الموضحة أعلاه للكشف عن التواجد البشري الثابت إلى حد كبير من خلال استخدام دائرة قاطع إشارة كما هو موضح في محاكاة GIF التالية:
يُظهر الفحص الدقيق أن الحركة التذبذبية في الواقع ليست مطلوبة ببساطة ، ويمكن السماح للمحرك وشفرة المروحية بالدوران بحرية عن طريق الحفاظ على سرعة المحرك عند مستوى أقل .
ومن شأن ذلك أيضًا أن يُنجز بشكل فعال عملية استشعار PIR الساكن.

فيديو توضيحي يثبت الاكتشاف البشري الثابت لـ PIR
السابق: شرح 3 دوائر تبديل مفعلة بالصوت التالي: 4 دوائر صفارة إنذار بسيطة يمكنك بناؤها في المنزل