
الحاجة!
يعد الازدحام المروري من المشكلات الرئيسية التي تواجه أي مدينة مترو. الوقوع بين الازدحام المروري يمثل صداعًا لكل شخص يقود السيارة وحتى لشرطة المرور في السيطرة على حركة المرور.
كانت إحدى أقدم الطرق للتعامل مع حركة المرور هي وجود شرطي مرور منتشر عند كل تقاطع طرق ويتحكم يدويًا في تدفق حركة المرور من خلال الإشارات اليدوية. ومع ذلك ، كان هذا مرهقًا جدًا ثم ظهرت الحاجة إلى نوع مختلف من التحكم - باستخدام إشارات المرور.
استخدمت أجهزة التحكم في إشارات المرور التقليدية جدولًا زمنيًا ثابتًا محددًا مسبقًا لتدفق حركة المرور لكل اتجاه في التقاطع. كانت وحدة التحكم عبارة عن وحدة تحكم كهروميكانيكية تتكون من أنظمة ميكانيكية تعمل بالكهرباء. وهو يتألف من ثلاثة أجزاء رئيسية - جهاز توقيت الاتصال الهاتفي ، وملف لولبي ، ومجموعة كام. يقوم المحرك ومجموعة التروس بتشغيل مؤقت الاتصال الهاتفي الذي بدوره يكون مسؤولاً عن تنشيط أو إلغاء تنشيط الملف اللولبي والذي بدوره يقوم بتشغيل مجموعة كامة تكون مسؤولة عن توفير التيار لكل مؤشرات إشارة. يُستخدم مؤقت الاتصال لتوفير تكرار لفترات زمنية ثابتة.
ومع ذلك ، فإن الفكرة الكاملة لجهاز التحكم في إشارات المرور للوقت الثابت ليست مناسبة للمدن التي يكون فيها تدفق حركة المرور متغيرًا. لهذا السبب ، هناك حاجة إلى نظام ديناميكي للتحكم في حركة المرور ، والذي يتحكم في إشارات المرور وفقًا لكثافة حركة المرور.
كيف يبدو نظام التحكم الديناميكي في حركة المرور؟
- العرض: هذا هو الأساس عرض إشارة المرور يمكن لسائق السيارة أو المسافر رؤيتها. يمكن أن تكون مصابيح التفريغ المتوهجة التقليدية أو ترتيب LED.

عرض إشارة المرور
- وحدة الكاشف: إنها الوحدة التي تكتشف وجود المركبات وترسل هذه المعلومات إلى وحدة التحكم لتتم معالجتها.
عمليا هناك نوعان من أجهزة الكشف:
- كاشف الحلقة الاستقرائي: وهو يتألف من ملف من الأسلاك مدمج في أخدود على سطح الطريق محكم الغلق بمطاط. يكتشف التغيير في التردد. يتم توصيل ملف الحث بالكاشف الذي يكتشف التغيير في تردد الرنين في حلقة الملف وبالتالي يتحكم في تشغيل المرحل الذي يستخدم لتشغيل إشارات المرور. إنه يعمل بشكل أساسي على مبدأ أنه عندما تتحرك السيارة فوق ملف الحث ، ينخفض تحريض الملف. يتسبب هذا الحث المنخفض في زيادة تردد الرنين أو التذبذب ، وبالتالي ترسل وحدة الإلكترونيات نبضات كهربائية إلى وحدة التحكم للتحكم في تبديل إشارات المرور. ومع ذلك ، فإن عيب هذا النظام هو أن حلقات الحث عرضة للتداخل الكهرومغناطيسي ، أي أن الإشعاع الكهرومغناطيسي من الأجهزة الأخرى يمكن أن يؤثر أيضًا على المجال المغناطيسي وبالتالي على تحريض الملف. كما أنها أكثر عرضة للفشل وتتطلب تكلفة تركيب عالية وتتسبب أيضًا في تعطيل حركة المرور.

التحكم في إشارات المرور باستخدام كاشف الحلقة الاستقرائي
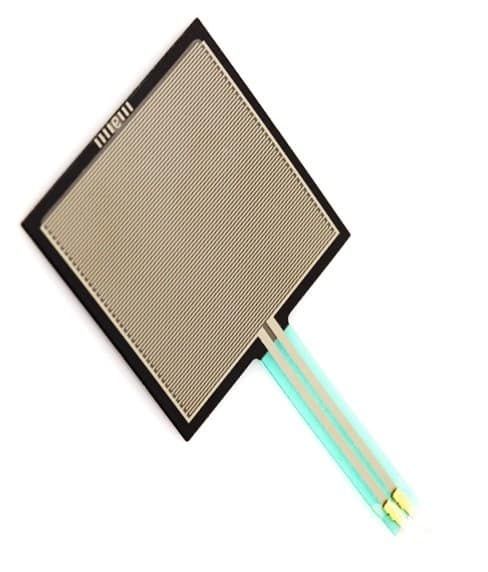
- مجسات مثبتة على أعمدة: يمكن أن يكون ترتيب IRLED-Photodiode بسيطًا أو وحدة كشف فيديو يمكنها اكتشاف وجود المركبات. يعمل هذا على مبدأ أنه عندما تمر سيارة بين جهاز إرسال الأشعة تحت الحمراء ومستقبل الأشعة تحت الحمراء ، يتم حظر ضوء الأشعة تحت الحمراء ونتيجة لذلك تزداد مقاومة الثنائي الضوئي. يمكن تحويل هذا التغيير في المقاومة إلى نبضات كهربائية تستخدم للتحكم في إشارات المرور.

التحكم في إشارات المرور باستخدام مجسات مثبتة على أعمدة
- وحدة تحكم: إنها الوحدة التي تستقبل خرج الكاشف الذي يعطي مؤشرا على وجود المركبات وبالتالي يقوم بحساب كثافة حركة المرور وبالتالي يتحكم في وحدة العرض. يمكن أن يكون جهاز كمبيوتر يعتمد على معالج دقيق أو متحكم بسيط.

وحدة تحكم
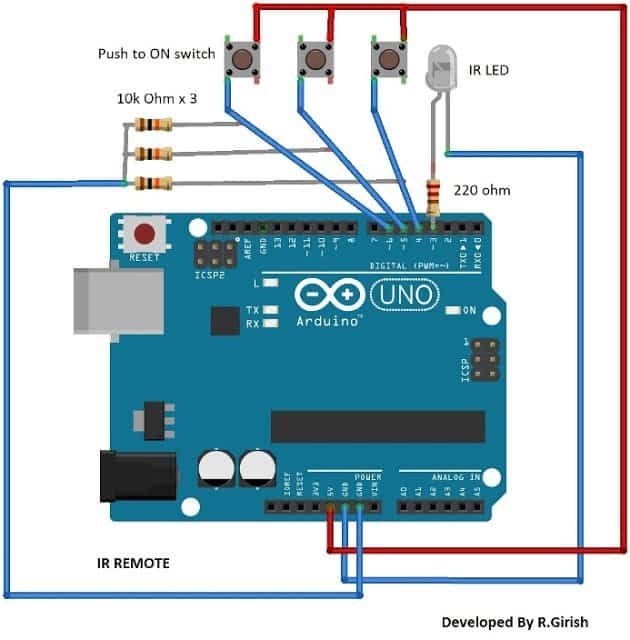
عرض توضيحي بسيط للتحكم في إشارة المرور المعتمدة على الكثافة باستخدام مستشعرات الأشعة تحت الحمراء
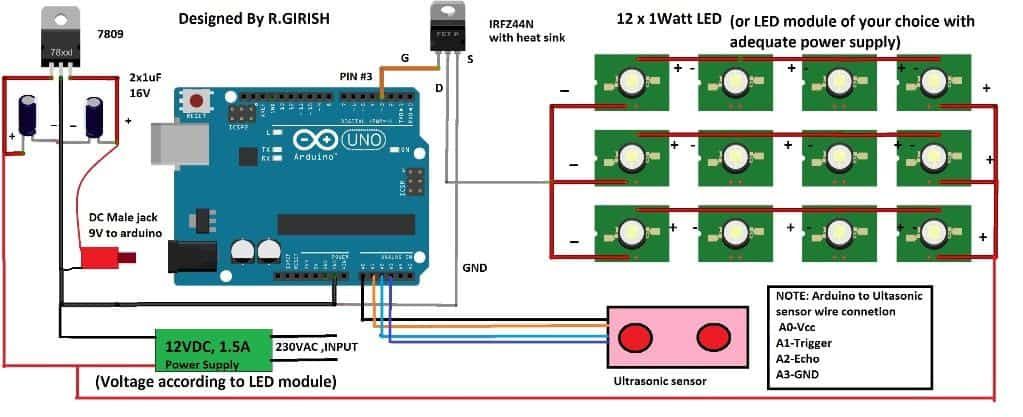
يمكن صنع نموذج أولي لنظام التحكم في إشارات المرور باستخدام مستشعرات الأشعة تحت الحمراء جنبًا إلى جنب مع متحكم دقيق ومصابيح LED والتي يمكن أن تثبت قيمتها للتطبيق في الوقت الفعلي للتحكم في إشارات المرور بناءً على كثافة حركة المرور. التقاطع المذكور هنا هو تقاطع من 4 جوانب مع تدفق حركة المرور في كل جانب بطريقة واحدة فقط. يتكون النظام من المكونات الثلاثة الرئيسية التالية:
- وحدة العرض: تتكون من 3 مصابيح LED- أخضر ، أحمر وكهرماني في كل جانب من جوانب التقاطع ، بإجمالي 12 مصباح LED.
- وحدة الكاشف: تتكون من ترتيب من مجموعة الصمام الثنائي الضوئي و IR LED عند كل تقاطع والتي تكتشف وجود المركبات عن طريق اكتشاف التغيير في المقاومة.
- وحدة التحكم: تتكون من متحكم يستقبل إخراج مستشعر الأشعة تحت الحمراء وبالتالي يتحكم في توهج مصابيح LED

نموذج أولي للتحكم في إشارة المرور على أساس الكثافة

مخطط كتلة يوضح التحكم في إشارة المرور على أساس الكثافة
في الظروف العادية ، أي عندما لا تكون هناك سيارة على الطريق ، يرسل جهاز إرسال الأشعة تحت الحمراء أو مؤشر LED للأشعة تحت الحمراء ضوء الأشعة تحت الحمراء الذي يستقبله الثنائي الضوئي ، والذي يبدأ في التوصيل. أثناء إجراء الثنائي الضوئي ، يقوم الترانزستور المقابل أيضًا بإعطاء خرج إشارة منطقية منخفضة إلى متحكم . يعمل نفس المبدأ مع جميع أجهزة استشعار ترانزستور الأشعة تحت الحمراء الأخرى. يجعل المتحكم الدقيق كل توهج LED لمدة محددة من الوقت.
الآن في حالة وجود مركبات ، يتم قطع الاتصال بين مرسل الأشعة تحت الحمراء والمستقبل ، أي أن الثنائي الضوئي يستقبل كمية أقل من الضوء أو لا يستقبلها من الصمام الثنائي IR وبالتالي ينخفض تيار القاعدة إلى الترانزستور ، مما يجعل الموصل ينتقل إلى خارج الحالة. يؤدي هذا إلى إخراج إشارة منطقية عالية من الترانزستور إلى وحدة التحكم الدقيقة. وفقًا لذلك ، يقوم المتحكم الدقيق بتغيير وقت التوهج الخاص بمؤشر LED الأخضر للوصل المقابل إلى قيمة أعلى.
وبالتالي مع زيادة عدد المركبات ، يضيء الضوء الأخضر لمزيد من الوقت ، مما يسمح بتدفق سريع لحركة المرور من جانب التقاطع.
حتى الآن ، لدينا فكرة موجزة عن السيطرة أشارات المرور باستخدام وسائل مختلفة. ماذا عن التحكم من خلال السيارة نفسها ، مثل الاتصال بين السيارة وإشارات المرور. يتم استخدام هذا النظام بالفعل في بعض أنحاء العالم. تعرف على ذلك وقدم ملاحظاتك.
مصدر الصورة:
- عرض إشارة المرور بواسطة ويكيميديا
- وحدة التحكم بواسطة المشفرة tbn3




{kind=link}