أجهزة سلسلة TSOP17XX عبارة عن مستشعرات متطورة تعمل بالأشعة تحت الحمراء لها تردد مركزي محدد للعملية مما يجعل اكتشافها موثوقًا للغاية ومضمونًا.
في هذا المنشور ، نتعلم كيفية توصيل مستشعر الأشعة تحت الحمراء من سلسلة TSOP واستخدامه في عمليات التحكم عن بعد بالأشعة تحت الحمراء المحددة.
مواصفات مستشعر TSOP IR
قد تتكون سلسلة TSOP من دوائر استشعار الأشعة تحت الحمراء من العديد من المتغيرات التي تختلف بشكل هامشي عن بعضها البعض ، وقد تكون في شكل TSOP22 .. ، TSOP24 .. ، TSOP48 .. ، TSOP44 ..
ومع ذلك ، فإن الأكثر شيوعًا والأكثر استخدامًا هي وحدة TSOP1738 IC التي تأتي من سلسلة TSOP17XX.
المتغيرات الأخرى من هذه المجموعة متوفرة بالأرقام التالية:
TSOP1733، TSOP1736، TSOP1737، TSOP1740، TSOP1756، TSOP1738CB1، TSOP1738GL1، TSOP1738KA1، TSOP1738KD1، TSOP1738KS1، TSOP1738RF1، TSOP1738SA1، TSOP1738SB1، TSOP1738SE1، TSOP1738SF1، TSOP1738TB1، TSOP1738UU1، TSOP1738WI1، TSOP1738XG1، TSOP1740، TSOP1740CB1، TSOP1740GL1، TSOP1740KA1، TSOP1740KD1، TSOP1740KS1، TSOP1740RF1.
جميع متغيرات TSOP المذكورة أعلاه لها ميزات وخصائص متطابقة باستثناء تردد العمل المركزي ، والذي قد يتراوح عادةً بين 30 كيلو هرتز إلى 60 كيلو هرتز.
كيفية توصيل مجسات TSOP1738
يعد توصيل أو توصيل مستشعر الأشعة تحت الحمراء TSOP1738 أمرًا سهلاً للغاية ، بمجرد أن تعرف كيف يستجيب لجهد الإمداد وإشارات الأشعة تحت الحمراء المطبقة عبر نقاط التوصيل المحددة الخاصة به.
يُظهر الرسم البياني أدناه جهاز استشعار الأشعة تحت الحمراء TSOP القياسي IC ، والذي يمكن رؤيته بوضوح على أنه (-) و (+) و OUT.
إن (+) و (-) هما دبابيس إمداد IC ويتم تحديدهما ليتم توصيلهما عبر مستوى إمداد نموذجي 5 فولت ، وللتحديد أي جهد بين 3 و 6 فولت قد يتم تطبيقه هنا ، على الرغم من أن 5 فولت يعمل بشكل أفضل ، و يوصى به لأنه يمكن تصميمه بسهولة باستخدام منظم 5V IC 7805 ويسمح باستخدام مجموعة واسعة من المدخلات (بين 6V و 24V).
العدسة المنحنية التي يمكن رؤيتها على الجزء المركزي من جسم المستشعر هي المكان الذي تركز فيه إشارة الأشعة تحت الحمراء من جهاز التحكم عن بعد لتمكين TSOP من بدء عمليات الاستشعار الخاصة به.
Pinouts الاستشعار

ملاحظة: يختلف قطبية pinout عن كاشف TSOP1838 IR ، كما هو موضح أدناه. لذا يرجى التحقق من تسلسل pinout إذا كنت تستخدم متغيرًا مختلفًا من IC.

كيفية توصيل جهد العرض بـ TSOP1738
توضح الصورة التالية كيف يحتاج TSOP1738 IC إلى أن يكون سلكيًا ومتصلًا عبر جهد إمداد معين وكيف يمكن إنهاء خرجه بدائرة سائق الترحيل للتبديل المقصود من المرحل وفقًا لاستجابة المستشعر لإشارة الأشعة تحت الحمراء.
وصلات الأسلاك الموضحة مخصصة لـ الغرض الإرشادي فقط ، يمكن ربطها عمليًا من خلال مسارات ثنائي الفينيل متعدد الكلور.

كيف يستجيب TSOP1738 لإشارة الأشعة تحت الحمراء
دعونا نتعلم كيف يتصرف مستشعر TSOP1738 السلكي أو يستجيب عندما تركز إشارة الأشعة تحت الحمراء على العدسة.

في الرسم البياني أعلاه ، نرى أنه نظرًا لأن إدخال العرض غير متصل بدائرة TSOP ، فإن مخرجاته تظل خامدة أو غير نشطة ، مما يعني أنها ليست موجبة ولا سلبية.

مقطع فيديو
في البداية يكون الإخراج a + 5V (مستوى الإمداد)
بمجرد تطبيق TSOP بجهد إمداد (عبر منظم 5V) ، فإنه يستجيب بجعل دبوس الخرج مرتفعًا أو عند المستوى الموجب (+ 5V).
يتم الحفاظ على هذا المستوى ، طالما أن إشارة إدخال الأشعة تحت الحمراء غير موجهة أو مركزة نحو عدسة TSOP

عندما يتم تطبيق إشارة الأشعة تحت الحمراء
في الرسم البياني أعلاه يمكننا أن نرى تردد إشارة الأشعة تحت الحمراء يتم تطبيقها والاقتراب من عدسة TSOP ، حتى تلامس عدسة المستشعر.
في اللحظة التي تصل فيها إشارة الأشعة تحت الحمراء إلى عدسة TSOP ، يبدأ خرج TSOP في الاستجابة والتأرجح جنبًا إلى جنب مع إشارة الأشعة تحت الحمراء المركزة.
الشكل الموجي الناتج من جهاز الاستشعار
يشير شكل الموجة الناتج إلى كيفية تأرجح خرج IC بين حالة موجبة (أولية) وسالبة (حالة استشعار) عبر دبابيس 'OUT' في نمط بديل ، طالما ظل إدخال IR مركزًا تجاهه.
كيفية تكوين الاستجابة أعلاه من مستشعر TSOP1738 لقيادة مرحلة الترحيل.
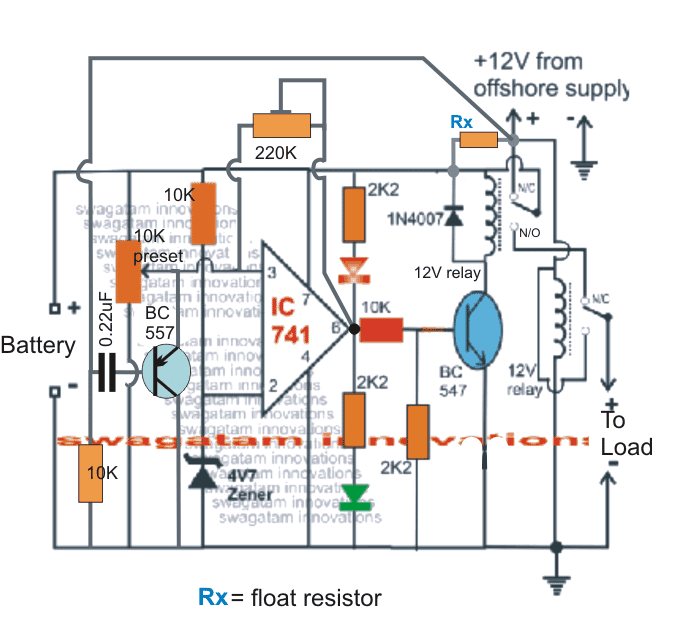
يمكن رؤية مثال كلاسيكي في الرسم التخطيطي التالي المأخوذ من المقالة 'تغذية الأسماك التي يتم التحكم فيها عن بعد'، حيث يمكننا رؤية TSOP قيد الاستخدام لتطبيق تحكم عن بعد بالأشعة تحت الحمراء ولإجراء تبديل استجابة لإشارة تشغيل إدخال IR.
تفاصيل الاتصال الأساسية لـ TSOP1738 في الدائرة

تصميم مبسط

مخطط التطبيق لعملية التتابع TSOP1738

قائمة الاجزاء
R1 ، R3 = 100 أوم
R4 ، R2 = 10 ألف
T1 = BC557
T2 = BC547
مرحل 12 فولت ، 400 أوم
IC = 7805
D1 = 1N4007
المستشعر = TSOP17XX
C1 ، C2 = 22 فائق التوهج / 25 فولت
هنا يمكننا أن نرى أنه يتم استخدام ترانزستور PNP لتبديل المرحل ، دعنا نتعرف على سبب الحاجة إلى جهاز PNP بالضبط لتبديل مستشعر TSOP ، ولماذا قد لا يكون NPN BJT مناسبًا لنفسه.
من خلال الشرح أعلاه ، فهمنا حقيقة أنه بينما يكون TSOP في وضع الاستعداد أو طالما أنه لا توجد إشارة IR مركزة ، فإن الإخراج من الجهاز يحمل إمكانات إيجابية.
هذا يعني أنه إذا تم استخدام NPN بالاقتران مع هذا الإخراج ، فإن هذا سيجبر الترانزستور على البقاء في وضع التشغيل في وضع الاستعداد ، وإيقاف تشغيله في وجود إشارة الأشعة تحت الحمراء ...
هذا غير صحيح من الناحية الفنية لأن هذا من شأنه أن يبقي المرحل في وضع التشغيل طوال الوقت ويتم إيقاف تشغيله فقط أثناء تشغيل إشارة الأشعة تحت الحمراء ... هذا الشرط غير موصى به ولذلك نستخدم ترانزستور PNP الذي يعكس الاستجابة من مستشعر TSOP والتبديل المرحل ON فقط استجابة لإشارة الأشعة تحت الحمراء ، ويبقي المرحل مغلقًا بشكل طبيعي أثناء وجود المستشعر في وضع الاستعداد (لا توجد إشارة IR).
هنا يتم استخدام C2 لتصفية التموجات أو خرج التيار المستمر النابض لـ TSOP ، بحيث يتم تنشيط الترانزستورات بشكل صحيح ودون التسبب في تأثير الثرثرة على التتابع
زوج من: اجعل نظام الغسالة البسيط هذا التالي: دائرة تغذية الأسماك التي يتم التحكم فيها عن بعد - التحكم في الملف اللولبي