في هذا المنشور ، سوف نتعلم ما هو محرك سيرفو ، وكيف يعمل ، وكيفية التفاعل مع وحدة التحكم الدقيقة وما الذي يجعل هذا المحرك مميزًا عن المحركات الأخرى.
نظرًا لكوننا من عشاق الإلكترونيات ، فقد صادفنا العديد من أنواع المحركات ، وهنا سنلقي نظرة على نوع خاص من المحركات يسمى محرك سيرفو.
ما هو محرك سيرفو؟
محرك مؤازر أو محرك مؤازر ببساطة هو نوع خاص من المحركات مصمم للتحكم الدقيق في الموضع ، والتسارع والسرعة. على عكس جميع أنواع المحركات الأخرى ، يمكن أن تدور المؤازرة 180 درجة ثنائية الاتجاه فقط. لديها تروس ميكانيكية وسدادة تحد من الدوران الزاوي لمؤازرة.
محرك سيرفو نموذجي:

تُستخدم المحركات المؤازرة في الروبوتات ، وكاميرات الدوائر التلفزيونية المغلقة ، والسيارات RC ، والقوارب ، وطائرات الألعاب وما إلى ذلك ، حيث يتم استخدام الماكينات حيث لا نحتاج إلى استمرار الحركة الدورانية ، ولكن يتم قفلها في موضع معين أو نقل بعض الأحمال بسرعة محكومة ضمن الحد الزاوي المتحرك.
المؤازرة ليست مجرد محرك مثل الأنواع الأخرى ، ولكنها وحدة نمطية ، تجمع بين محرك عادي يعمل بالتيار المستمر / التيار المتردد ، ومجموعة من التروس ، وإلكترونيات التحكم ونظام التغذية المرتدة. دعونا نلقي نظرة على كل المراحل المذكورة بالتفصيل.
يمكن أن يكون محرك DC / AC الذي يتم استخدامه في وحدة مؤازرة محركًا بدون فرش أو محرك ناعم ، في معظم محركات الهوايات التي تستخدم محرك DC وتستخدم محركات التيار المتردد في التطبيقات الصناعية. يعطي المحرك مدخلات دورانية إلى المؤازرة. يدور المحرك بعدة مئات من الدورات في الدقيقة داخل المؤازرة ويكون دوران الخرج أقل بحوالي 50 مرة أو أكثر من عدد الدورات في الدقيقة.
المرحلة التالية هي مجموعة التروس ، التي تتحكم في الدوران الزاوي وسرعة المؤازرة. قد يكون الترس مصنوعًا من البلاستيك أو المعدن اعتمادًا على حجم الحمولة الضخمة. بشكل عام ، يتم تشغيل محركات التيار المستمر عند عدد دورات مرتفع في الدقيقة وعزم دوران منخفض ، ستقوم مجموعة التروس بتحويل عدد الدورات في الدقيقة الزائدة إلى عزم دوران. وبالتالي يمكن لمحرك صغير التعامل مع حمولة ضخمة.
المرحلة التالية هي إلكترونيات التحكم التي تتكون من MOSFETs و ICs للتحكم في دوران المحرك. يوجد دائمًا نظام تغذية مرتدة في محركات مؤازرة لتتبع الوضع الحالي للمشغل.
في الماكينات بشكل عام ، يكون مكون التغذية المرتدة هو مقياس الجهد ، والذي يرتبط مباشرة بالمشغل الدوار. يعمل مقياس الجهد كمقسم للجهد يتم تغذية إلكترونيات التحكم. تساعد هذه الملاحظات في التحكم في الإلكترونيات لتحديد مقدار الطاقة الممنوحة للمحرك.
سيحجم محرك سيرفو في وضع ثابت عن التحرك من موضعه الحالي إذا حاولت أي قوة خارجية الإزعاج. يراقب نظام التغذية المرتدة الوضع الحالي ويزود المحرك بالطاقة ضد الاضطرابات الخارجية.
السيناريو أعلاه هو نفسه عندما تحرك المؤازرة مشغلها. سيعوض نظام التحكم القوة الخارجية ويتحرك بسرعة محددة.
الآن أنت تعرف القليل عن محرك سيرفو وآلية عمله. دعونا نرى كيفية التحكم في المحركات المؤازرة باستخدام متحكم دقيق.
تحتوي المحركات المؤازرة على 3 أطراف على عكس المحركات الأخرى التي لها طرفان ، اثنان للتزويد (5 فولت اسمي) وواحد لإشارة التحكم. الأسلاك ملونة لتسهيل التعرف على المحطات.
إشارات التحكم في الماكينات هي PWM بتردد 50 هرتز. يحدد عرض نبضة الإشارة موضع ذراع المشغل. محرك سيرفو نموذجي يعمل من 1 إلى 2 مللي ثانية من عرض النبض.
سيؤدي تطبيق إشارة التحكم في عرض النبضة 1 مللي ثانية إلى إبقاء المشغل في وضع 0 درجة. سيؤدي تطبيق إشارة التحكم في عرض النبض بمقدار 2 مللي ثانية إلى إبقاء المشغل في وضع 180 درجة. سيؤدي تطبيق الإشارات بين 1-2 مللي ثانية إلى إبقاء المشغل بزاوية 0-180 درجة. يمكن فهم هذا بشكل أفضل من خلال الصورة أدناه.

الآن قد فهمت كيف يتم التحكم في المؤازرة عن طريق تعديل عرض النبضة (PWM).
دعنا الآن نتعلم كيفية توصيل محرك مؤازر مع Arduino.
مخطط الرسم البياني:

الأسلاك سهلة ولا تحتاج إلى شرح. تحتاج إلى مصدر طاقة خارجي إذا كنت تستخدم محرك مؤازر ضخم. إذا حاولت التشغيل من مصدر طاقة اردوينو ، فسوف ينتهي بك الأمر إلى زيادة التحميل على منفذ USB على الكمبيوتر.
إذا كان لديك أجهزة مشابهة كما هو موضح في بداية المقالة ، فيمكنك تشغيلها من مصدر اردوينو 5V ، كما هو موضح في النموذج الأولي للمؤلف.
النموذج الأولي للمؤلف:

يحتاج Arduino إلى مكتبة مؤازرة للتعامل معها ، مما جعل مهمتنا سهلة وهي موجودة بالفعل في Arduino IDE.
برنامج:
//--------Program developed by R.Girish--------//
#include
Servo motor
int pos = 0
int t=10
void setup()
{
motor.attach(7)
}
void loop()
{
A:
pos=pos+1
motor.write(pos)
delay(t)
if(pos==180) { goto B}
goto A
B:
pos=pos-1
motor.write(pos)
delay(t)
if(pos==0) { goto A}
goto B
}
//--------Program developed by R.Girish--------//
سيكتسح البرنامج أعلاه المشغل من 0 إلى 180 درجة لليمين و 180 إلى 0 درجة لليسار وتكرار الدورة. هذا برنامج بسيط لاختبار المؤازرة التي قد تحتاجها لكتابة التعليمات البرمجية الخاصة بك لتطبيقاتك المخصصة.
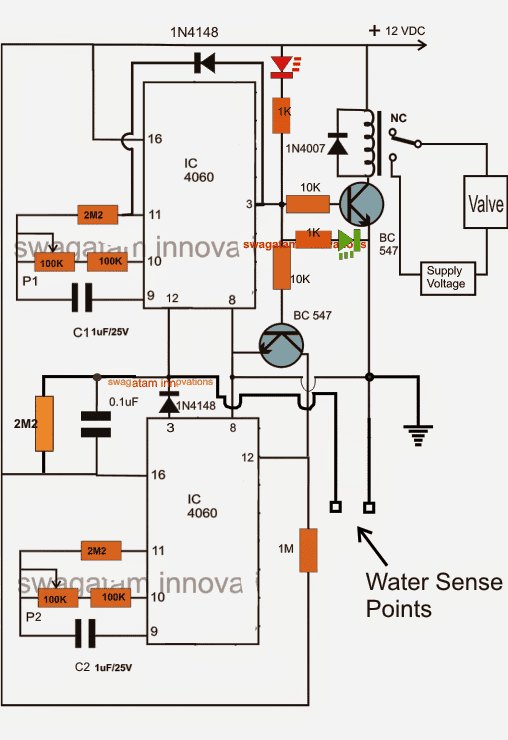
زوج من: دائرة تحكم صمام مضخة مياه الأنبوب التالي: فهم أسلاك منظم الجهد للدراجات النارية