في هذا المنشور ، سوف نتعرف على وحدة تشغيل المحرك L298N ذات الجسر H المزدوج والتي يمكن استخدامها لقيادة محركات التيار المستمر المصقولة والمحركات السائر باستخدام وحدات التحكم الدقيقة والدوائر المتكاملة.
ملخص
تعد لوحات الدوائر المعيارية أفضل توفير للوقت لمصممي الإلكترونيات مما يقلل أيضًا من أخطاء النماذج الأولية. يفضل هذا في الغالب من قبل المبرمجين الذين يكتبون رمزًا لوحدات التحكم الدقيقة ، حيث يقضون معظم وقتهم عن طريق كتابة الرموز أمام الكمبيوتر ولديهم وقت أقل في لحام المكونات الإلكترونية المنفصلة.
لهذا السبب يمكننا أن نجد أطنانًا وأطنانًا من الدوائر المعيارية المختلفة مصنوعة فقط من أجل لوحات Arduino ، فمن السهل التفاعل والاستفادة من أقل أخطاء في الأجهزة أثناء تصميم النموذج الأولي الخاص بنا.
شكل توضيحي لوحدة L298N:

تم تصميم الوحدة حول IC L298N وهي متوفرة بشكل شائع في مواقع التجارة الإلكترونية.
نحن نستخدم سائقي المحركات DC لأن الدوائر المتكاملة والميكروكونترولر غير قادرة على توصيل تيار لا يزيد عن 100 مللي أمبير بشكل عام. تعتبر وحدات التحكم الدقيقة ذكية ولكنها ليست قوية ، وستضيف هذه الوحدة بعض العضلات إلى Arduino و ICs وغيرها من وحدات التحكم الدقيقة لتشغيل محركات التيار المستمر عالية الطاقة.
يمكنه التحكم في محركي DC في وقت واحد حتى 2 أمبير لكل محرك أو محرك متدرج واحد. نحن نقدر التحكم في السرعة باستخدام PWM وكذلك اتجاه دوران المحركات.
هذه الوحدة مثالية لـ بناء الروبوتات ومشاريع نقل الأرض مثل سيارات اللعب.
دعونا نرى التفاصيل الفنية لوحدة L298N.

دبوس الوصف:
· على الجانب الأيسر يوجد منفذ OUT1 و OUT2 ، وهو مخصص لتوصيل محرك التيار المستمر. وبالمثل ، OUT3 و OUT4 لمحرك DC آخر.
يتم تمكين المسامير ENA و ENB ، عن طريق توصيل ENA إلى ارتفاع أو + 5 فولت ، فإنه يتيح منفذ OUT1 و OUT2. إذا قمت بتوصيل دبوس ENA بالمنخفض أو الأرضي ، فإنه يعطل OUT1 و OUT2. وبالمثل ، بالنسبة لـ ENB و OUT3 و OUT4.
· IN1 إلى IN4 هي دبابيس الإدخال التي سيتم توصيلها بـ Arduino. إذا قمت بإدخال IN1 + Ve و IN2 –Ve من متحكم دقيق أو يدويًا ، يتحول OUT1 إلى الارتفاع ويتحول OUT2 إلى الانخفاض ، وبالتالي يمكننا قيادة المحرك.
· إذا قمت بإدخال IN3 مرتفعًا ، فإن OUT4 يتحول إلى ارتفاع وإذا قمت بإدخال IN4 منخفض ، يتحول OUT3 إلى مستوى منخفض ، فيمكننا الآن قيادة محرك آخر.
· إذا كنت ترغب في عكس اتجاه دوران المحرك ، فما عليك سوى عكس قطبي IN1 و IN2 ، وبالمثل بالنسبة لـ IN3 و IN4.
من خلال تطبيق إشارة PWM على ENA و ENB ، يمكنك التحكم في سرعة المحركات على منفذي إخراج مختلفين.
· يمكن أن يقبل المجلس من 7 إلى 12 فولت اسميًا. يمكنك إدخال الطاقة في محطة + 12V والأرضي إلى 0V.
· المحطة الطرفية + 5 فولت هي الإخراج والتي يمكن استخدامها لتشغيل Arduino أو أي وحدة أخرى إذا لزم الأمر.
صداري:
هناك ثلاثة دبابيس توصيل يمكنك التمرير لأعلى لرؤية الصورة الموضحة.
سيتم توصيل جميع وصلات العبور في البداية بإزالة العبور أو الاحتفاظ به حسب حاجتك.
الطائر 1 (انظر الصورة الموضحة):
· إذا كان محركك بحاجة إلى أكثر من إمداد بجهد 12 فولت ، فيجب عليك فصل وصلة العبور 1 وتطبيق الجهد المطلوب (بحد أقصى 35 فولت) عند طرف 12 فولت. أحضر آخر 5V العرض والمدخلات في محطة + 5V. نعم ، يجب عليك إدخال 5 فولت إذا كنت بحاجة إلى تطبيق أكثر من 12 فولت (عند إزالة وصلة المرور 1).
· المدخل 5V هو من أجل حسن أداء IC ، حيث أن إزالة وصلة المرور ستعطل منظم 5v المدمج وتحمي من جهد الدخل العالي من طرف 12v.
· تعمل المحطة الطرفية + 5 فولت كإخراج إذا كان إمدادك يتراوح بين 7 إلى 12 فولت ويعمل كمدخل إذا قمت بتطبيق أكثر من 12 فولت وتم إزالة العبور.
معظم المشاريع تحتاج فقط إلى جهد للمحرك أقل من 12 فولت ، لذا حافظ على العبور كما هو واستخدم محطة + 5 فولت كمخرج.
Jumper 2 و Jumper 3 (انظر الصورة الموضحة):
· إذا قمت بإزالة هذين العبورين ، فيجب عليك إدخال إشارة التمكين والتعطيل من وحدة التحكم الدقيقة ، ويفضل معظم المستخدمين إزالة العبور وتطبيق الإشارة من وحدة التحكم الدقيقة.
· إذا احتفظت بالعبوتين ، فسيتم دائمًا تمكين OUT1 إلى OUT4. تذكر وصلة ENA لـ OUT1 و OUT2. وصلة عبور ENB لـ OUT3 و OUT4.
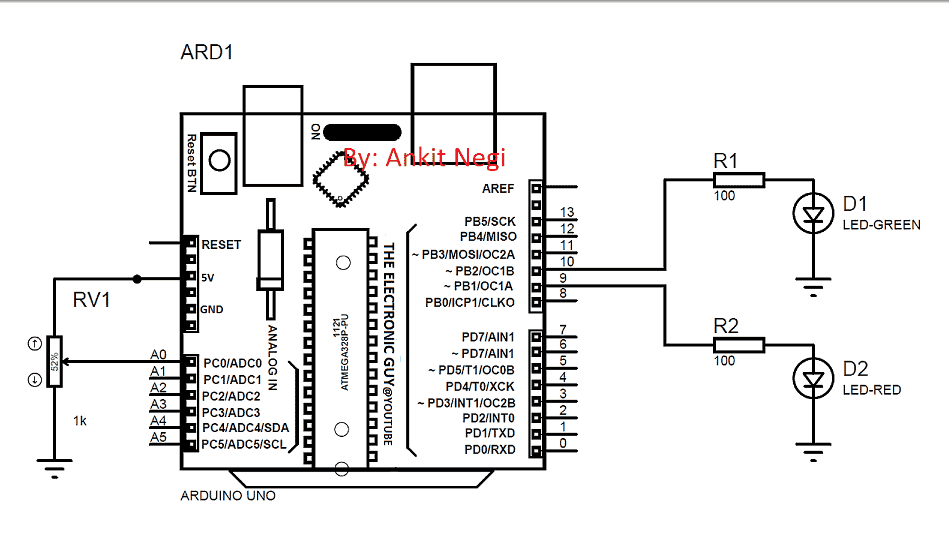
الآن دعونا نرى دائرة عملية ، كيف يمكننا ذلك محركات الواجهة ، اردوينو وتزويد وحدة السائق.
تخطيطي:

يمكن استخدام الدائرة المذكورة أعلاه لسيارات اللعب ، إذا قمت بتغيير الرمز بشكل مناسب وأضفت عصا تحكم.
تحتاج فقط إلى تشغيل وحدة L289N وستقوم الوحدة بتشغيل Arduino عبر محطة Vin.
ستدير الدائرة المذكورة أعلاه كلا المحركين على مدار الساعة لمدة 3 ثوانٍ وتتوقف لمدة 3 ثوانٍ. بعد ذلك سوف يدور المحرك عكس اتجاه عقارب الساعة لمدة 3 ثوانٍ ويتوقف لمدة 3 ثوانٍ. هذا يدل على H- الجسر في العمل.
بعد ذلك سيبدأ كلا المحركين بالدوران ببطء في عكس اتجاه عقارب الساعة واكتساب السرعة تدريجيًا إلى الحد الأقصى وتقليل السرعة تدريجيًا إلى الصفر. يوضح هذا التحكم في سرعة المحركات بواسطة PWM.
برنامج:
//----------------Program developed by R.GIRISH--------------//
const int Enable_A = 9
const int Enable_B = 10
const int inputA1 = 2
const int inputA2 = 3
const int inputB1 = 4
const int inputB2 = 5
void setup()
{
pinMode(Enable_A, OUTPUT)
pinMode(Enable_B, OUTPUT)
pinMode(inputA1, OUTPUT)
pinMode(inputA2, OUTPUT)
pinMode(inputB1, OUTPUT)
pinMode(inputB2, OUTPUT)
}
void loop()
{
//----Enable output A and B------//
digitalWrite(Enable_A, HIGH)
digitalWrite(Enable_B, HIGH)
//----------Run motors-----------//
digitalWrite(inputA1, HIGH)
digitalWrite(inputA2, LOW)
digitalWrite(inputB1 , HIGH)
digitalWrite(inputB2, LOW)
delay(3000)
//-------Disable Motors----------//
digitalWrite(Enable_A, LOW)
digitalWrite(Enable_B, LOW)
delay(3000)
//-------Reverse Motors----------//
digitalWrite(Enable_A, HIGH)
digitalWrite(Enable_B, HIGH)
digitalWrite(inputA1, LOW)
digitalWrite(inputA2, HIGH)
digitalWrite(inputB1 , LOW)
digitalWrite(inputB2, HIGH)
delay(3000)
//-------Disable Motors----------//
digitalWrite(Enable_A, LOW)
digitalWrite(Enable_B, LOW)
delay(3000)
//----------Speed rise----------//
for(int i = 0 i < 256 i++)
{
analogWrite(Enable_A, i)
analogWrite(Enable_B, i)
delay(40)
}
//----------Speed fall----------//
for(int j = 256 j > 0 j--)
{
analogWrite(Enable_A, j)
analogWrite(Enable_B, j)
delay(40)
}
//-------Disable Motors----------//
digitalWrite(Enable_A, LOW)
digitalWrite(Enable_B, LOW)
delay(3000)
}
//----------------Program developed by R.GIRISH--------------//
النموذج الأولي للمؤلف:

إذا كان لديك أي أسئلة بخصوص مشروع محرك L298N DC هذا ، فلا تتردد في التعبير عنه في قسم التعليقات ، فقد تتلقى ردًا سريعًا.
زوج من: دارة شاحن بطارية متعددة باستخدام مكثف تفريغ التالي: عصا التحكم للسيارة 2.4 جيجا هرتز RC باستخدام Arduino