يُطلق على الجهاز أو الآلة الكهروميكانيكية المستخدمة لأغراض مختلفة ويتم التحكم فيها وتشغيلها بمساعدة تقنيات البرمجة اسم روبوت. الروبوتات هي أنواع مختلفة بناءً على تطبيقاتها مثل الروبوتات الصناعية والروبوتات العسكرية وروبوتات الفضاء والروبوتات المحلية وروبوتات المشي وروبوتات التسلق وما إلى ذلك. الأكثر تقدما مشاريع الروبوتات يتم تطويرها للاستخدام الفعال في مختلف المجالات للعديد من التطبيقات. في هذه المقالة ، دعونا نناقش نوعًا خاصًا من مشاريع الروبوتات ، ألا وهو خط تتبع المركبات الآلية بآلية المشي والتسلق.
مركبة آلية

مشاريع الروبوتات لطلاب الهندسة
ال المركبات الآلية هي أنواع خاصة من الآلات مصممة للتحرك على الأرض وفي الهواء وتحت الماء وفي الفضاء بشكل مستقل دون وجود إنسان على متنها. يتم التحكم في هذه المركبات الآلية وتشغيلها بواسطة أجهزة استشعار مختلفة أنظمة التحكم القائمة. تم تصميم المركبات الآلية خصيصًا للاستخدام في الظروف التي يتعذر فيها على البشر الدخول مثل حوادث الحريق ودرجات الحرارة العالية جدًا أو المنخفضة جدًا ، إلخ.
روبوت تابع الخط

روبوت تابع الخط
يمكن تسمية السيارة الروبوتية التي تتحرك باتباع مسار أو خط معين باسم أ روبوت أتباع الخط . تُستخدم روبوتات متابعة الخطوط هذه بشكل خاص في التطبيقات الصناعية لأغراض خاصة مثل نقل الأجزاء أو الآلات أو المركبات المختلفة (السيارات والدراجات وما إلى ذلك) باتباع خط معين من نقطة واحدة (وحدة توليد) إلى نقطة أخرى (وحدة التجميع) .
يعد الخط العادي الذي يتبع مركبة آلية ذات ميزات خاصة مثل آلية المشي والتسلق أحد مشاريع الروبوتات المثيرة للاهتمام لطلاب الهندسة ، والتي يمكن استخدامها لعدة تطبيقات. فيما يلي خطوات بسيطة لتصميم روبوت يتبع الخط مع آلية للمشي والتسلق.
الخطوة 1: جمع المكونات المطلوبة

المكونات الكهربائية والإلكترونية
يجب تقدير المكونات المطلوبة لخط التصميم الذي يتبع مركبة آلية مزودة بآلية المشي والتسلق بناءً على تطبيق الروبوت. اجمع جميع المكونات الكهربائية والإلكترونية مثل المقاومات والمكثفات وأجهزة إرسال الأشعة تحت الحمراء ومحركات التيار المستمر والترانزستورات وجسم الروبوت والصمامات الضوئية مع التصنيفات المناسبة جنبًا إلى جنب مع أجزاء أخرى مثل الورق المقوى والبراغي والصواميل وشرائط الألومنيوم وما إلى ذلك ، حسب المتطلبات.
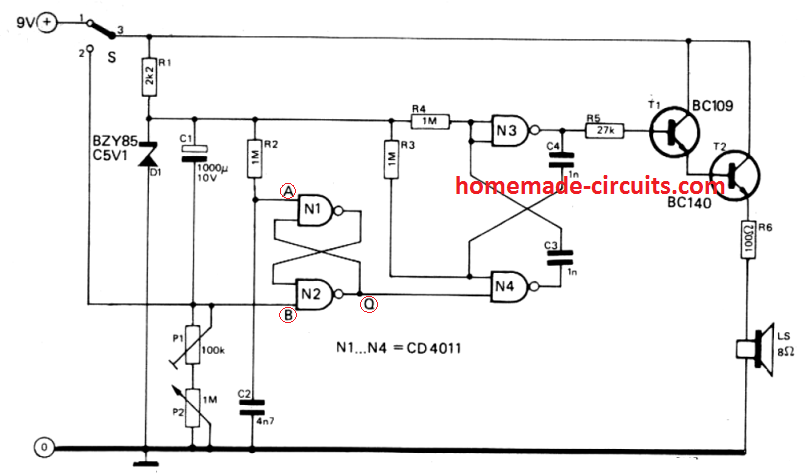
Step2: تحليل الدائرة لروبوت تابع الخط

خط بعد مركبة روبوتية قابلة للتوسيع للمشي وتسلق كتلة الروبوت
صمم بشكل أساسي مخططًا للكتل لدارات المشروع باستخدام كتل مختلفة مثل a كتلة امدادات الطاقة ، IR LED وكتلة الثنائي الضوئي وما إلى ذلك. بعد تجميع المكونات ، قم بتحليل تصميم الدائرة بناءً على عمل المكونات المختلفة المستخدمة. ثم ضع المكونات فوق لوح تجارب غير ملحوم وفقًا لمخطط الدائرة باستخدام أسلاك التوصيل لاختبار الدائرة التي تعمل قبل تجميع الدائرة على PCB. من خلال اختبار الدائرة على اللوح غير الملحوم إذا كانت هناك أي تغييرات مطلوبة في الدائرة أو تصنيفات المكونات ، يمكن إجراء البدائل بسهولة دون إضاعة المال والوقت لاستبدال المكونات أو لتغيير تصميم الدائرة.
Step3: مكونات التجميع واللحام

الخط التالي للمركبة الروبوتية القابلة للتوسيع لمشروع روبوت المشي والتسلق
وبالتالي ، بعد تحليل تصميم الدائرة ، قم بتجميع المكونات وفقًا لمخطط الدائرة فوق PCB. بعد ذلك ، قم بلحام الدائرة باستخدام مسدس اللحام وسلك اللحام باتباع إرشادات اللحام المناسبة. قم بتوصيل جميع أجزاء الروبوت بشكل صحيح لتشكيل روبوت تابع للخطوط كما هو موضح في الصورة أعلاه ولصق أجزاء السيارة الآلية ، إذا لزم الأمر.
Step4: عمل روبوت تابع الخط
يتم استخدام مرسل الأشعة تحت الحمراء والثنائي الضوئي كملف مستشعر الصورة زوج يمكن استخدامه لاكتشاف المسار المحدد لحركة روبوت أتباع الخط أثناء المشي وتسلق الجدران. يعطي زوج المستشعر الضوئي إشارات مناسبة لتبديل الترانزستورات لقيادة محركات روبوت أتباع الخط.
Step5: مركبة روبوتية تتبع الخط مع آلية للمشي والتسلق
هناك العديد مشاريع الروبوتات لطلاب الهندسة في أي خط تعتبر السيارة الروبوتية للمتابعة مع آلية المشي والتسلق مشروعًا مبتكرًا ومثيرًا للاهتمام للتصميم بنفسك باستخدام كتابنا الإلكتروني المجاني لتصميم مشاريع الإلكترونيات.
ال تطبيق الروبوتات يتزايد بسرعة في حياتنا اليومية للعديد من الوظائف مثل التطبيقات الصناعية - تحريك أو رفع المنتجات الثقيلة ، والنقل داخل منطقة محدودة باتباع مسار معين ، والمعالجة ، واللحام ، والأجهزة المنزلية ، والروبوتات المستقلة ، والروبوتات العسكرية لتقليل الإنسان المشاركة والخطر ، الروبوتات التعاونية للتفاعل مع البشر مثل تلك التي تؤدي العديد من المهام ، والروبوتات التعليمية ، والروبوتات المتنقلة ، والروبوتات البشرية.
هل أنت مهتم بالتصميم مشاريع الإلكترونيات لوحدك؟ هل تعرف كيف تطور روبوتات بشرية؟ إذا كنت تريد معرفة المزيد عن مشاريع الروبوتات لطلاب الهندسة ، فيمكنك نشر استفساراتك وتعليقاتك وأفكارك واقتراحاتك في قسم التعليقات أدناه للحصول على أي مساعدة فنية.