في هذه المقالة ندرس مستشعر الميكروويف IC KMY 24 ونحاول فهم ميزاته الرئيسية وتفاصيل تنفيذ pinout.
كيف يعمل مستشعر دوبلر KMY24
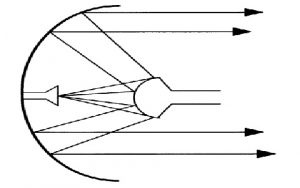
تم تصميم وحدة حساس الميكروويف KMY24 وبناءً على مفهوم تأثير دوبلر. عند تكوينه بشكل صحيح ، فإنه يشع إشارة ميكروويف منخفضة الطاقة تبلغ حوالي 2.45 جيجاهرتز عبر المنطقة الموجهة.
عندما يأتي كائن (هدف) يمكن أن يكون إنسانًا في نطاق الإشارة المنبعثة ، تنعكس الإشارات مرة أخرى إلى وحدة المستشعر مع بعض الاضطراب بالنسبة للتردد الأصلي ، وهذا ما يُعرف عمومًا باسم تحول دوبلر.


بمجرد أن يكتشف المستشعر هذا التحول المنعكس في التردد ، تقوم الدائرة المدمجة على الفور بمزج التردد المنعكس مع التردد الأصلي الحالي وتنتج ترددين فرديين عبر مخرجاتها المحددة.
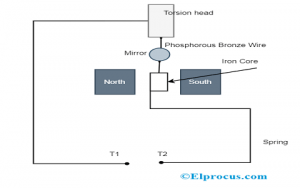
ما هو تأثير دوبلر
وفقًا لمبادئ تأثير دوبلر ، يمكن أن يكون تحول طور التردد هذا إيجابيًا أو سلبيًا اعتمادًا على ما إذا كان الكائن في منطقة المستشعر ينحسر أو يقترب من المستشعر.
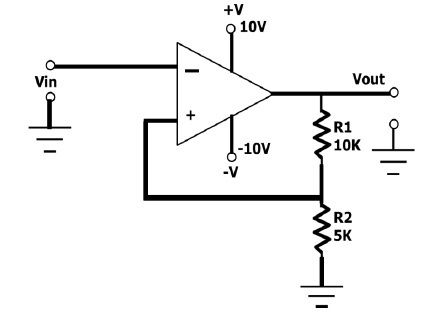
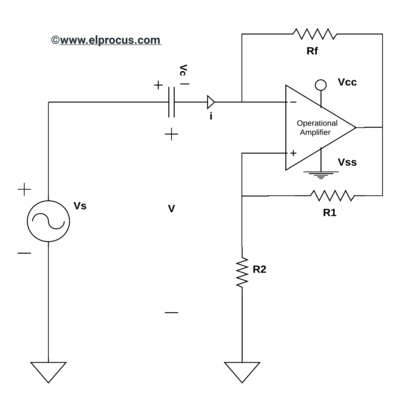
تنتهي وظيفة KMY24 هنا ، وتحتاج مخرجات الجهاز الآن إلى تضخيمها من خلال تكوين مضخم جهد مناسب ، على سبيل المثال من خلال دائرة مضخم opamp التفاضلية وما إلى ذلك.
علاوة على ذلك ، قد يتم إنهاء إخراج opamp بشكل مناسب بمرحلة ترحيل أو مسجل أو إنذار لتمييز أو تحديد المعلمات المستشعرة.
الميزات الفنية لل IC
يمكن تعلم الميزات الرئيسية لـ IC KMY24 على النحو التالي:
- حساسية عالية واكتشاف حتى عندما يقترب هدف أصغر نسبيًا من المنطقة.
- دوائر خلاط مزدوجة لتمكين كشف الحركة الاتجاهية للهدف
- موثوقية عالية لتحقيق نتائج مضمونة
- استهلاك ضئيل للطاقة مما يجعلها مناسبة تمامًا للتطبيقات التي تعمل بالبطاريات.
- الحد الأدنى من الانبعاث التوافقي لتقليل اضطراب التردد اللاسلكي في الغلاف الجوي.
- حجم مضغوط.
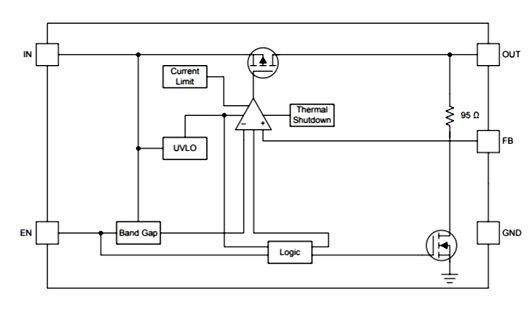
توضح الصورة التالية تفاصيل pinout لمستشعر الميكروويف KMY 24
تفاصيل Pinout لجهاز استشعار الميكروويف IC

توفر الصورة التالية معلمات الانهيار أو الحد الأقصى المطلق للجهد والتصنيفات الحالية التي يجب تطبيقها على IC ، ويجب عدم تجاوز هذه المعلمات ، وللتحديد يجب أن تظل هذه القيم أقل بكثير من القيم الموضحة.
الحد الأقصى لمواصفات التسامح الكهربائي

توضح الصورتان الموضحتان أدناه تحول الطور أو الاختلاف في موضع التردد المنعكس بالنسبة للتردد المشع الأصلي عند اقتراب الهدف (الصورة الأولى أدناه) ، وعندما يتراجع الهدف أو يتراجع (الرسم البياني الثاني أدناه) ).
تحليل فرق تحول المرحلة


في المقالة التالية (القادمة) سنحاول فهم كيفية استخدام مستشعر الميكروويف من خلال دائرة عملية.
السابق: دائرة عربة التحكم عن بعد بدون متحكم التالى: كيفية عمل دائرة إنذار أمن رادار جيجاهرتز