في هذا المنشور ، سنستكشف ورقة بيانات PIR أو مستشعر الأشعة تحت الحمراء الكهروضوئي HC-SR501. سوف نفهم لأي غرض يستخدم مستشعر PIR؟ عمليات التشغيل الأساسية وتفاصيل اتصال الدبوس والمواصفات الفنية وأخيراً سننظر في بعض التطبيقات الواقعية.
سنبدأ بفهم وحدة مستشعر PIR الفعلية المثبتة بالداخل وحدات PIR القياسية ومعرفة خصائصه الداخلية وتفاصيل pinout وتفاصيل العمل الداخلية.

ما هو مستشعر PIR؟
يرمز PIR إلى مستشعر الأشعة تحت الحمراء الكهروضوئي أو مستشعر الأشعة تحت الحمراء السلبية. PIR عبارة عن مستشعر إلكتروني يكتشف التغيرات في ضوء الأشعة تحت الحمراء عبر مسافة معينة ويعطي إشارة كهربائية عند خرجها استجابة لإشارة الأشعة تحت الحمراء المكتشفة. يمكنه اكتشاف أي كائن ينبعث من الأشعة تحت الحمراء مثل البشر أو الحيوانات إذا كان نطاق المستشعر ، أو يتحرك بعيدًا عن النطاق ، أو يتحرك داخل نطاق المستشعر.
يمكن تقسيم وحدة مستشعر PIR إلى جزأين: بلورة حساسة للأشعة تحت الحمراء ودائرة المعالجة.
شكل توضيحي لبلورة حساسة PIR:

الجزء المظلم من المعدن حيث توجد البلورة الحساسة للأشعة تحت الحمراء ، يمكن أن تكتشف البلورة الحساسة مستوى الأشعة تحت الحمراء في المناطق المحيطة. إنه يضم في الواقع مستشعرين كهربائيين حراريين لاكتشاف الأجسام المتحركة. إذا اكتشفت إحدى البلورات الحساسة تغيرًا في الأشعة تحت الحمراء (زيادة أو نقصان) عن البلورة الحساسة الأخرى ، يتم تشغيل الإخراج.
عادة ما يتم وضع هيكل بلاستيكي على شكل قبة فوق هذه البلورة الحساسة والتي تعمل كعدسة لتركيز ضوء الأشعة تحت الحمراء على المستشعرات.
كيف يعمل PIR
تعتمد عملية الاستشعار لمستشعر الأشعة تحت الحمراء الكهروحرارية على الخاصية أو الخاصية التي تصبح مسؤولة عن تغيير استقطاب مادته استجابة لتغيرات درجة الحرارة.
تستخدم هذه المستشعرات ثنائية أو زوجًا من عناصر الاستشعار لاستشعار إشارات الأشعة تحت الحمراء على خطوتين ، مما يضمن اكتشافًا مضمونًا عن طريق إلغاء التغيرات غير المرغوب فيها في درجة الحرارة داخل مرحلة EMI الحالية. تعمل عملية الاستشعار المكونة من خطوتين على تحسين الاستقرار العام للمستشعر وتساعد على اكتشاف إشارات الأشعة تحت الحمراء من الوجود البشري فقط.
عندما يتحرك كائن بشري أو مصدر ذو صلة بالأشعة تحت الحمراء متجاوزًا مستشعر PIR ، فإن الإشعاع يقطع زوجًا من عناصر الاستشعار بطريقة بديلة ، مما يؤدي إلى إنتاج زوج من ON / OFF أو نبضات عالية ومنخفضة ، كما هو موضح في الشكل الموجي التالي:

تُظهر محاكاة Gif التقريبية التالية كيف يستجيب مستشعر PIR للإنسان المتحرك ويطور بضع نبضات حادة قصيرة عبر خيوط الإخراج الخاصة به للمعالجة المطلوبة أو تشغيل مرحلة الترحيل المكونة بشكل مناسب

تخطيط داخلي لـ PIR
يوضح الشكل التالي التخطيط الداخلي أو التكوين داخل مستشعر PIR القياسي.

على اليسار يمكننا أن نرى زوجًا من عناصر استشعار الأشعة تحت الحمراء متصلة في سلسلة. يتم توصيل الطرف العلوي من هذه السلسلة ببوابة FET المدمجة والتي تعمل كمضخم إشارة IR صغير. يوفر المقاوم المنسدل Rg منطق الاستعداد صفر المطلوب إلى FET للتأكد من أنه يظل مغلقًا تمامًا في حالة عدم وجود إشارة الأشعة تحت الحمراء.
عندما يتم الكشف عن إشارة الأشعة تحت الحمراء المتحركة بواسطة زوج من عناصر الاستشعار ، فإنها تولد زوجًا مقابلاً من إشارات المنطق المرتفع والمنخفض كما تمت مناقشته أعلاه:
يتم تضخيم هذه النبضات بشكل مناسب بواسطة FET وتكرارها عند دبوس الإخراج الخاص بها لمزيد من المعالجة بواسطة دائرة متصلة.
توفر مراحل التداخل الكهرومغناطيسي المصاحبة جنبًا إلى جنب مع المكثف ترشيحًا إضافيًا للعملية ، من أجل إنتاج مجموعة نظيفة من النبضات عند دبوس الإخراج المشار إليه في PIR.
إعداد الاختبار لجهاز استشعار PIR
توضح الصورة التالية إعداد اختبار مستشعر PIR قياسي. يتم توصيل دبابيس الإخراج و Vss (الدبوس السالب) لـ PIR بمقاوم سحب خارجي ، ويتم تزويد دبوس Vdd بمصدر 5 فولت.

يولد الجسم الأسود القرطاسية الأشعة تحت الحمراء المكافئة المطلوبة لمستشعر PIR من خلال آلية المروحية. تقطع لوحة المروحية بالتناوب إشارات الأشعة تحت الحمراء التي تحاكي هدف الأشعة تحت الحمراء المتحرك.
تصل إشارة الأشعة تحت الحمراء المقطعة هذه إلى مستشعر PIR لتوليد النبضات المحددة عبر دبوس الإخراج الخاص بها ، والذي يتم تضخيمه بشكل مناسب من خلال opamp للتحليل على نطاق.
يمكن رؤية شروط الاختبار المثالية للإعداد أعلاه أدناه:

موازنة ناتج عنصر الاستشعار
نظرًا لاستخدام آلية استشعار مزدوجة في PIRs ، يصبح من الضروري التأكد من أن المعالجة من خلال زوج العدسات متوازنة بشكل صحيح.
يتم اختبار عناصر الاستشعار وتكوينها بشكل مناسب من خلال تقييم جهد خرج الإشارة الفردية (SSOV) من خلال الصيغة التالية:
الميزان: | Va - Vb | / (Va + Vb) × 100٪
حيث ، Va = حساسية الجانب A (من الذروة بالسيارات إلى الذروة)
Vb = جانب الحساسية B (من الذروة بالسيارات إلى الذروة)
المواصفات الرئيسية
يمكن التعرف على المواصفات الفنية الرئيسية ومعلمات الأبعاد لجهاز استشعار PIR من التفاصيل التالية:

استخدام وحدات PIR الداخلية
ستجد اليوم وحدات PIR بها مستشعر PIR مدمج مع دائرة معالجة متخصصة وعدسة. يعمل هذا على تحسين أداء PIR عدة طيات ويسمح للمستخدم النهائي بالحصول على إخراج مُحسّن ومضخم ومحدّد جيدًا من الوحدة.
يحتاج هذا الإخراج الآن فقط إلى أن يتم تكوينه مع مرحلة الترحيل لتبديل التشغيل / الإيقاف المطلوب للحمل استجابة للوجود البشري عبر المنطقة المنصوص عليها.
تتكون الدائرة داخل الوحدات القياسية من IC BISS0001 المصمم خصيصًا لتطبيقات كشف الحركة. يتم توفير مقبضين ، أحدهما لضبط حساسية الوحدة ومقبض آخر لضبط طول الوقت للمدة التي يجب أن يظل فيها الإخراج مرتفعًا بعد تشغيل الوحدة.

الآن دعنا نتحرى التفاصيل الفنية لمستشعر PIR HC-SR501.
جهد التشغيل:
تتراوح HC-SR501 من 5 فولت إلى 20 فولت ، مما يوفر مرونة كبيرة لمصممي الدوائر.
الاستهلاك الحالي:
HC-SR501 هو جهاز صديق للبطارية ، استهلاكه الحالي 65 مللي أمبير عندما يكتشف أي تغيير في ضوء الأشعة تحت الحمراء.
الجهد الناتج:
عندما تكتشف الوحدة حركة الأشعة تحت الحمراء ، يرتفع الناتج عند 3.3 فولت ، إذا لم تكتشف الوحدة أي حركة ، فإنها تصبح منخفضة أو 0 فولت بعد فترة زمنية محددة.
وقت التأخير:
يتم توفير مقبض لضبط وقت الإخراج ليبقى مرتفعًا بعد اكتشاف الأشعة تحت الحمراء. يمكن تعديل هذه الفترة الزمنية من 5 ثوانٍ إلى 5 دقائق.
نطاق الحساسية:
زاوية منطقة الكشف حوالي 110 درجة مخروط. يتم إعطاء مقبض لضبط الحساسية التي يمكن أن تختلف من 3 أمتار إلى 7 أمتار عموديًا على السينور. تقل الحساسية كلما تحركنا على جانبي المستشعر.
درجة حرارة التشغيل:
تتميز HC-SR501 بدرجة حرارة تشغيل مذهلة تتراوح من -15 إلى +70 درجة مئوية.
تيار هادئ:
التيار الهادئ هو التيار المستهلك من الإمداد ، عندما لا يكتشف المستشعر أي حركة أو عندما يكون في وضع الخمول. يستهلك أقل من 50 uA ، مما يجعل بطارية المستشعر صديقة.

pinouts PIR وأنماط الزناد
أوضاع الزناد:
تحتوي وحدة PIR على وضعين للمشغل: وضع المشغل الفردي / عدم التكرار ومشغل التكرار. يمكن الوصول إلى هذين الوضعين عن طريق تغيير موضع العبور الوارد في الوحدة النمطية.
وضع الزناد الفردي / وضع عدم التكرار:
عندما يتم ضبط مستشعر PIR في وضع الزناد الفردي (ويتم ضبط مقبض المؤقت / وقت التأخير لمدة 5 ثوانٍ (على سبيل المثال)) ، عندما يتم اكتشاف الإنسان ، يتحول الخرج إلى HIGH لمدة 5 ثوانٍ ويتحول إلى LOW.
كرر وضع الزناد:
عندما يتم ضبط مستشعر PIR في وضع الزناد المتكرر ، عندما يتم الكشف عن إنسان ، يتحول الخرج إلى HIGH ، يحسب المؤقت لمدة 5 ثوانٍ ، ولكن عندما يتم اكتشاف شخص آخر في تلك الثواني الخمس ، يتم إعادة ضبط المؤقت إلى الصفر ويحتسب 5 ثوان أخرى بعد الثانية تم الكشف عن الإنسان.
وقت الحظر:
وقت الحظر هو الفاصل الزمني الذي يتم فيه تعطيل المستشعر أو عدم اكتشاف الحركة. وقت الحظر لـ HC-
SR501 هو 3 ثوان بشكل افتراضي.
يحدث هذا بعد وقت التأخير (الذي تم ضبطه بواسطة مقبض المؤقت) ، حيث يصبح الإخراج منخفضًا لمدة 3 ثوانٍ خلال هذا الفاصل الزمني ، ولن يتم اكتشاف أي حركة. بعد مرور 3 ثوانٍ (منخفض) ، سيكون المستشعر جاهزًا لاكتشاف الحركة مرة أخرى.
بمعنى آخر ، عندما يكتشف المستشعر الحركة ، يصبح الناتج مرتفعًا ، ويظل الناتج مرتفعًا وفقًا لمقبض المؤقت (على سبيل المثال 5 ثوانٍ) ، وبعد 5 ثوانٍ ينخفض مستشعر PIR ، وستبقى الإشارة المنخفضة لمدة 3 ثوانٍ بغض النظر عن الجديد الحركة إن وجدت.
أبعاد الوحدة:
المستشعر مضغوط بدرجة كافية ليخفي عن أعين الناس حتى لا يؤثر على التزيين وما إلى ذلك. يبلغ حجمه 32 ملم × 24 ملم.
حجم العدسة:
يُطلق على هيكل القبة البيضاء الذي يحيط بالمستشعر الكهروحراري عدسات فريسنل ، والتي تزيد من نطاق الكشف وتبدو معتمًا. يبلغ قطرها 23 ملم.
التطبيقات:
• انظمة حماية.
• مصابيح أوتوماتيكية.
• التحكم الآلي الصناعي.
• أبواب اتوماتيكية.
يمكنك العثور على بعض المشاريع التي تستخدم مستشعر PIR في هذا الموقع.
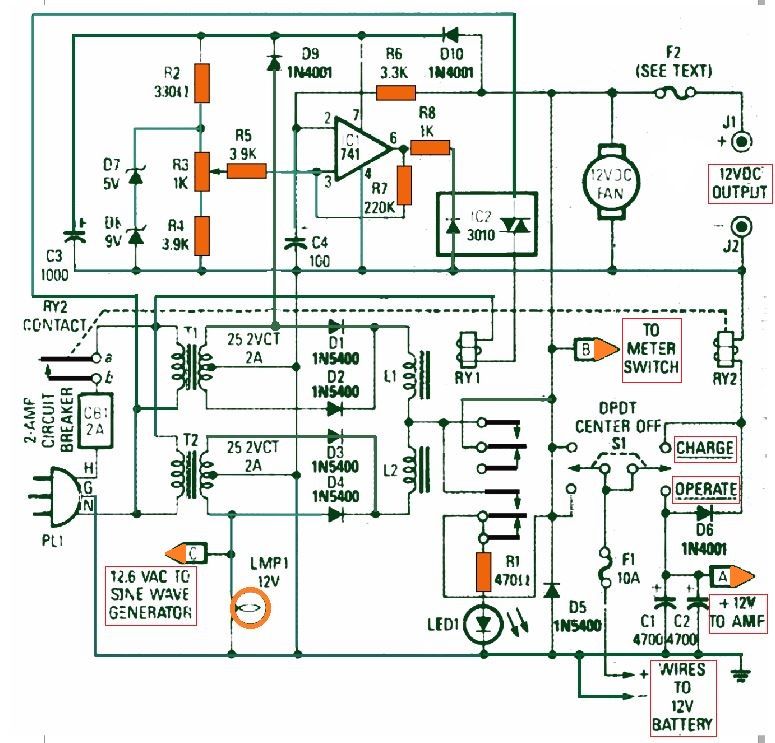
دارة نموذجية لوحدة PIR
بالنسبة للمتحمسين الذين يعتزمون بناء وحدة PIR كاملة جنبًا إلى جنب مع المستشعر ومضخم صوت كامل ، يمكن استخدام المخطط القياسي التالي واستخدامه لأي تطبيق يستند إلى مستشعر PIR.

هل لديك شكوك أو أسئلة أخرى؟ لا تتردد في طرحها من خلال مربع التعليق أدناه
زوج من: دائرة العاكس Arduino Full-Bridge (H-Bridge) التالي: دائرة كاشف سرعة السيارة لشرطة المرور