

روبوت تجسس الحرب مع كاميرا للرؤية الليلية
روبوت التجسس كما يوحي اسمه هو الذي يستخدم لغرض التجسس على أراضي العدو. يمكن أن تكون تطبيقاته:
- في وقت الحرب حيث يمكن استخدامها لجمع المعلومات من منطقة العدو ومراقبة تلك المعلومات في منطقة آمنة بعيدة ، ووضع خطة بأمان للهجوم المضاد.
- تعقب مواقع التنظيمات الإرهابية ثم التخطيط لهجوم في الوقت المناسب.
- إجراء مراقبة لأي منطقة منكوبة بالكوارث لا يمكن للبشر الذهاب إليها.
فكرة موجزة عن روبوت تجسس ميدان الحرب
لذا دعونا نحصل على فكرة موجزة عن كيفية استخدام الروبوت في حقول الحرب لأغراض التجسس. كل ما هو مطلوب هو كاميرا لاسلكية مثبتة على دائرة الروبوت تلتقط الصور ومقاطع الفيديو الخاصة بأراضي العدو وتنقل هذه الصور ، والتي يتم استقبالها بواسطة وحدة استقبال التلفزيون.
يمكننا تصميم نموذج أولي بسيط للحرب روبوت تجسس ميداني يمكن التحكم فيها عن بعد ويمكن مراقبة الصور التي تنقلها الكاميرا وتحليلها على جهاز تلفزيون.
تنفيذ الأجهزة لروبوت تجسس ميدان الحرب
كل ما نحتاجه هو المكونات التالية لتصميم روبوت تجسس ميداني حرب بصرف النظر عن قاعدة ذات عجلات ومحركات.
- وحدة الاستشعار - كاميرا الرؤية الليلية اللاسلكية: بصرف النظر عما تتكون الكاميرا الأساسية ، فهي تتكون من وحدة إرسال. يلتقط الصور وينقل هذه الصور من خلال جهاز الإرسال في شكل إشارات رقمية ، والتي يتم استقبالها بواسطة وحدة الاستقبال المتصلة بالتلفزيون أو الكمبيوتر. يمكن أن تكون الكاميرا على بعد 30 ميلاً من جهاز الاستقبال. أ كاميرا للرؤية الليلية يمكن أن يتلقى الإضاءة إما عن طريق تضخيم الضوء المرئي باستخدام مكثفات الصورة أو استخدام ضوء الأشعة تحت الحمراء مباشرة بواسطة الأشياء - التصوير الحراري أو ضوء الأشعة تحت الحمراء المنعكس بواسطة إضاءة الأجسام القريبة من الأشعة تحت الحمراء.
- وحدة استقبال: يتكون الروبوت أيضًا من وحدة استقبال تستقبل إشارات الأوامر للتحكم في المحركات وبالتالي وحدة الروبوت.
- المحركات: يتكون من محركي DC كمشغلين يوفران حركة عكسية وأمامية للروبوت.
- وحدة التحكم: وهو يتألف من وحدة إرسال عن بعد تتكون من متحكم دقيق ومشفّر ووحدة RF ووحدة استقبال مدمجة في الدائرة تتكون من وحدة مستقبل RF وميكروكونترولر وجهاز فك ترميز.
كيف تعمل كاميرا الرؤية الليلية لروبوت التجسس في ميدان الحرب؟
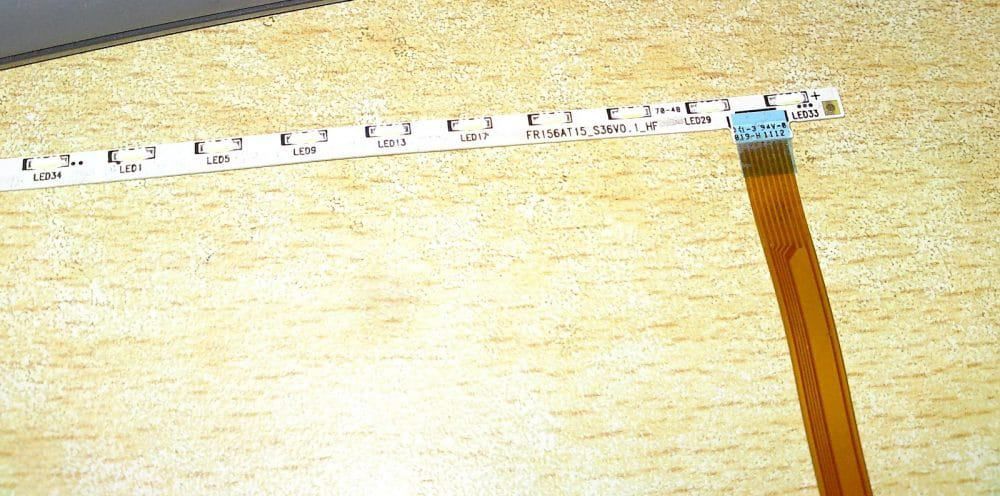
تتكون كاميرا الرؤية الليلية اللاسلكية المدمجة في الروبوت من جهاز إرسال لاسلكي. يتم وضع مجموعة من IR LEDs والتي تستخدم لتوفير ضوء الأشعة تحت الحمراء لمصادر الصورة. سبب تفضيل ضوء الأشعة تحت الحمراء هو أنه في الليل ، عادة ما يكون مظلمًا ولأن أي كاميرا تحتاج إلى إضاءة للإضاءة ، فإن ضوء الأشعة تحت الحمراء هو الخيار الأكثر تفضيلًا حيث تنبعث جميع الكائنات نطاقًا من ضوء الأشعة تحت الحمراء. تعمل الكاميرا ببطارية 12 فولت وتلتقط هذه الصور وتنقلها إلى وحدة الاستقبال المتصلة بوحدة التلفزيون. يتم تحويل الصور إلى إشارات رقمية بواسطة وحدة الإرسال وتستقبل وحدة الاستقبال هذه الإشارات الرقمية وتعيد تحويلها إلى صور ويتم بعد ذلك مراقبة هذه الصور أو مقاطع الفيديو وتحليلها على وحدة تلفزيون.

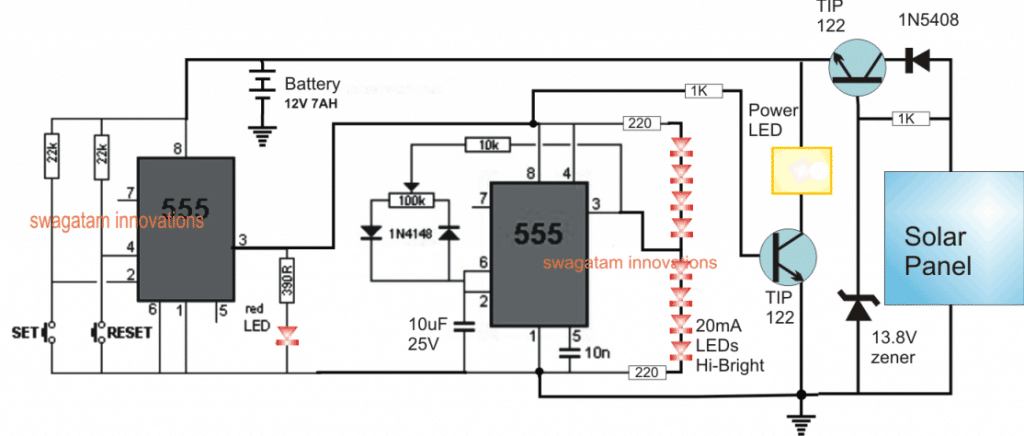
رسم تخطيطي يوضح كيفية عمل الروبوت بكاميرا للرؤية الليلية
التحكم في روبوت تجسس ميدان الحرب
يتم التحكم الكامل في الروبوت عن بعد. يتكون من قسم جهاز الإرسال الذي ينقل المعلومات المطلوبة إلى قسم جهاز الاستقبال. يتم تغطية الروبوت ببساطة بالضغط على بضعة أزرار في جانب جهاز الإرسال.

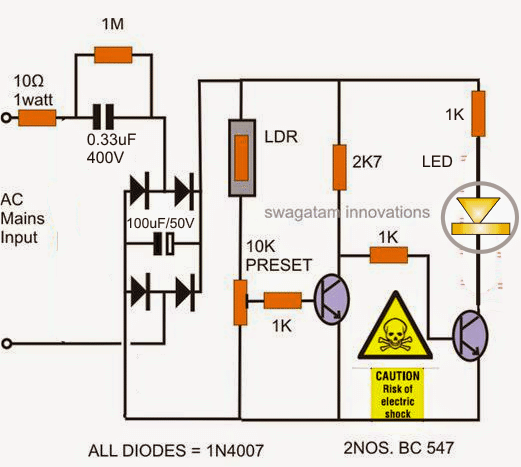
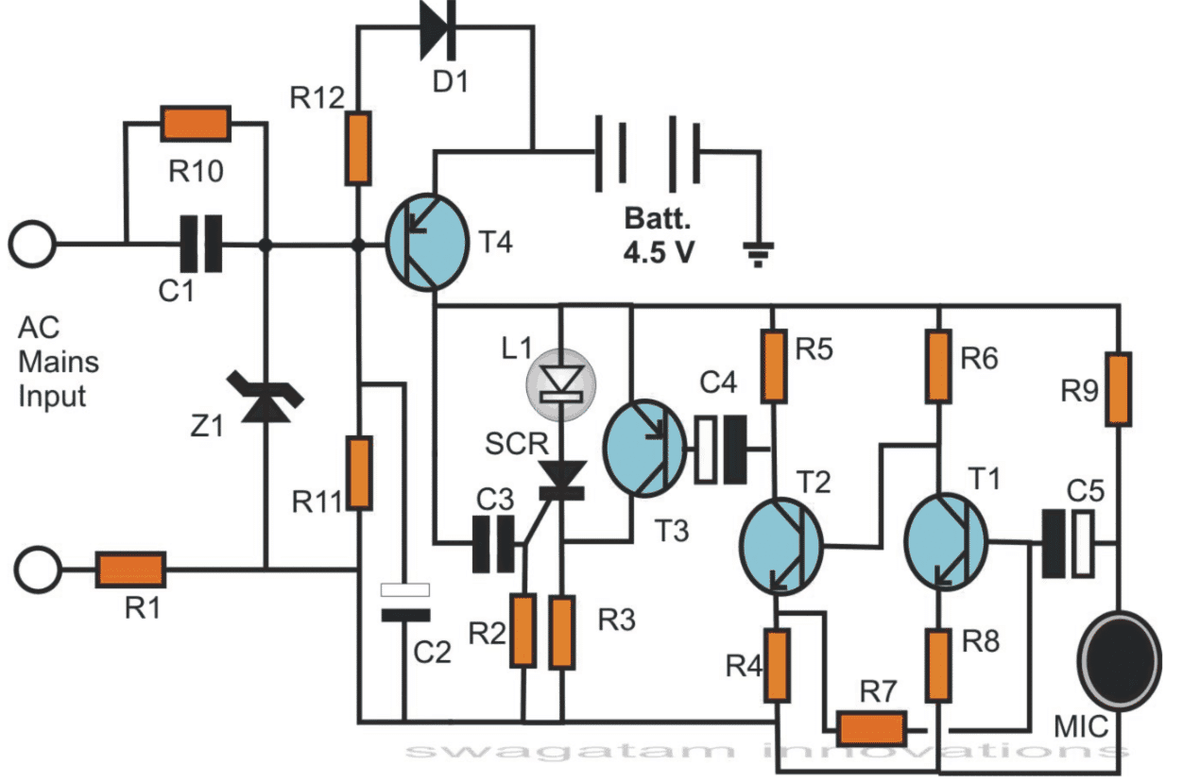
رسم تخطيطي يوضح مرسل روبوت تجسس مجال الحرب
تتكون وحدة الإرسال من جهاز تشفير يتلقى مدخلات البيانات المتوازية من وحدة التحكم الدقيقة عبر الأزرار الانضغاطية وتنقل هذه البيانات المتوازية بتنسيق تسلسلي عبر وحدة التردد اللاسلكي. عند الضغط على زر الضغط المعني ، تتم برمجة وحدة التحكم الدقيقة لإرسال الإشارات ذات الصلة إلى جهاز التشفير في شكل متوازي. يقوم المشفر بتحويل هذه الإشارات المتوازية إلى شكل تسلسلي لإرساله بواسطة وحدة التردد اللاسلكي. يتم تشكيل هذه البيانات التسلسلية بإشارة حاملة باستخدام جهاز إرسال RF وهو المرسل. على سبيل المثال ، إذا ضغطنا على الزر الأيسر ، يرسل الميكروكونترولر الأمر إلى وحدة الاستقبال من خلال وحدة التشفير ووحدة التردد اللاسلكي.

رسم تخطيطي يوضح متلقي روبوت تجسس ميدان الحرب
تتكون وحدة الاستقبال من وحدة مستقبل الترددات الراديوية التي تزيل تشكيل الإشارة المستقبلة وجهاز فك التشفير الذي يستقبل البيانات التسلسلية من خلال وحدة مستقبل التردد اللاسلكي ويحولها إلى شكل متوازي. يستخدم الميكروكونترولر هذه البيانات لإعطاء إشارة تحكم مناسبة لمحرك المحرك IC للتحكم في تشغيل المحركين. وبالتالي يمكن تحريك الروبوت للأمام أو في الاتجاه المعاكس من خلال التحكم في المحرك ، بينما تقوم الكاميرا بعملها في وقت واحد.
الروبوتات في العسكرية
الآن بعد أن أصبح لدينا فكرة موجزة عن روبوت ميدان الحرب ، دعونا نحصل على استدعاء موجز للروبوتات العملية في الدفاع.
من السمات الأساسية للروبوتات المستخدمة في العمليات العسكرية أنها ليست آلية بالكامل. في الواقع يتم التحكم فيها عن بعد من قبل البشر. يمكن أن تكون الروبوتات أو الآلات غير المأهولة كما يطلق عليها أي جسم متحرك أو طائرة طائرة مزودة بجميع المعدات اللازمة مثل أجهزة الاستشعار ، LIDARS (رادار الاتصالات القائمة على الليزر) ، والكاميرات ، وما إلى ذلك ، يمكن أن تكون عملياتهم من التخلص من القنابل إلى مسح العدو إقليم.
هناك 3 أنواع من الآليات غير المأهولة المستخدمة في العمليات العسكرية:
- مركبة أرضية بدون طيار (UGV): تستخدم للأغراض الأرضية. يمكن أن تحمل حمولة ثقيلة ، وتتحرك على تضاريس غير مستوية ، ولديها أجهزة استشعار وكاميرات مختلفة.

المصارع التكتيكي UGV
- مركبة جوية بدون طيار (UAV): تُستخدم لحمل أسلحة جوية وهي في الأساس آلات طيران.

مركبة جوية بدون طيار MQ-9 Reaper
- مركبة تحت الماء بدون طيار (UUV): هي في الأساس غواصات أو آلات يمكنها المسح تحت الماء.

تاليسمان UUV
الآن بعد أن حصلنا على معرفة بالروبوت الميداني الحربي ، دعنا ندخل في مهمة المعرفة حول استخدام الروبوتات في العمليات العسكرية لبلدنا وكيف تتقدم منظمتنا الدفاعية في هذا المجال؟
اعتمادات الصورة:
- المصارع التكتيكي UGV بواسطة ويكيميديا
- MQ-9 Reaper مركبة جوية بدون طيار بواسطة ويكيميديا
- تاليسمان UUV بواسطة المهندسين المرآب





{kind=link}
{kind=link}