في هذا المنشور ، نحقق في ماهية محرك BLDC ، ثم نتعلم فيما بعد فيما يتعلق بتصميم دائرة محرك BLDC بدون مستشعر.
مراوح وحدة المعالجة المركزية BLDC
هل رأيت تلك المراوح سريعة الحركة في وحدات المعالجة المركزية ، ومثبتات الجهد ، ومشغلات DVD ، وغيرها من المعدات المماثلة ، والتي تعمل بأقصى قدر من الكفاءة ، وتستهلك الحد الأدنى من المساحة ، والتيار ، ومع ذلك فهي قادرة على تقديم العمليات المهمة كما هو منصوص عليه لمعدات معينة؟
نعم ، هذه هي جميع الإصدارات الحديثة من مراوح BLDC أو محركات التيار المستمر التي لا تحتوي على فرش والتي تفوق بكثير المحركات التقليدية القديمة.

الصورة مجاملة: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh٪C3٪A4usel٪C3٪BCfter.jpg
ومع ذلك ، سيتطلب محرك BLDC دائرة تشغيل متطورة ، ونعم ، تحتوي جميع مراوح وحدة المعالجة المركزية هذه على وحدات التشغيل المدمجة هذه ، على الرغم من أنها تبدو قابلة للتشغيل بسهولة باستخدام DC عادي ، إلا أن النظام داخليًا مزود بالفعل بدائرة ذكية.
سائق محرك BLDC
هنا سوف نتعرف على إحدى دوائر سائق المحرك BLDC الذكية ، باستخدام شريحة واحدة DRV10963 لقيادة أي محرك BLDC صغير بكفاءة لا تصدق ، وفيما بعد في إحدى المقالات القادمة سنرى كيف يمكن ترقية دائرة IC هذه للقيادة حتى BLDCs القوية الحالية عالية مثل تلك التي المستخدمة في كوادكوبتر.
ولكن قبل ذلك سيكون من المثير للاهتمام معرفة القليل عن محركات BLDC.
الفرق بين محرك DC المصقول وبدون فرش
الفرق بين المحرك المصقول والمحرك بدون فرش ومعدل الكفاءة واضح إلى حد ما.
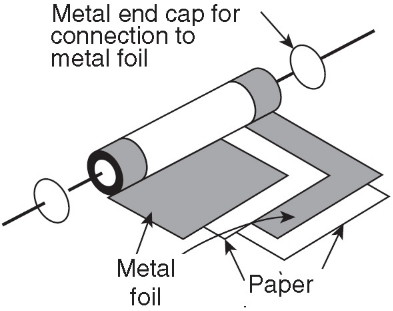
نظرًا لأن المحركات المصقولة تحتوي على عضو إنتاج الجرح نفسه يتحرك بين المغناطيسات ، فيجب أن تستخدم `` الفرشاة '' (ملامسات الاحتكاك) حتى تتمكن أطراف الملف المتحرك من تلقي جهد الإمداد باستمرار دون الحاجة إلى الوصول إلى مصدر الإمداد بأنفسهم ، الأمر الذي قد يجعل العمل مستحيل وتعريض العمليات للخطر.
في المحرك عديم الفرشاة ، لا يتحرك الملف أو الملف أبدًا ويكون ثابتًا ، وهنا يحمل الدوار مجموعة من المغناطيسات الدائمة ويدور في تأثير التدفقات المغناطيسية المحيطة باللف.
نظرًا لأن المغناطيس خالٍ من جميع المتاعب ، وقادر على العمل دون إشراك الأطراف في إدارة أو تلقي الطاقة ، فإنه يمكن أن يدور دون عناء ، ويدور بسرعة عالية وفي مستوى بلا ضوضاء تقريبًا.
ولكن هناك مشكلة هنا. من أجل جعل المغناطيس الكهربي يستجيب لتدفقات المغناطيس الدائم ، يجب أن يكون هناك تحول ثابت في الطور المغناطيسي أو الأقطاب ، بحيث يكون الطرفان قادران على التفاعل باستمرار والمرور من خلال قوة معاكسة ، وبالتالي تحرير القوة الالتوائية المطلوبة على الدوار وتنفيذ الدوران مع عزم الدوران الناتج.
في المحرك المصقول ، يصبح هذا أسهل نظرًا لطبيعة الضبط الذاتي لملف المحرك القادر على الدوران وإنشاء قوة مغناطيسية معارضة ذاتية الاستدامة والاستمرار في الدوران دون الحاجة إلى أي نبضات خارجية أو معالجة.
ومع ذلك ، تصبح هذه مشكلة في BLDC نظرًا لأن الدوار المغناطيسي يظل `` جاهلًا '' ويتطلب أمرًا مغناطيسيًا محسوبًا من الملف من أجل الدوران بطريقة ذات مغزى وليس بطريقة عشوائية.
هذا هو بالضبط السبب في أن جميع محركات BLDC تتطلب بشكل إلزامي دائرة سائق محرك للتحكم في المجموعات الثلاث المتميزة من اللف داخل المحرك.
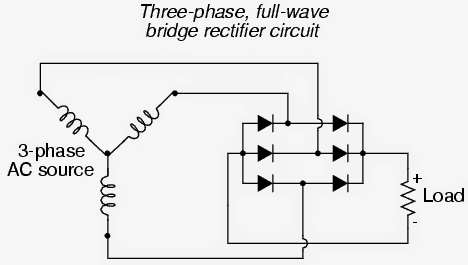
وبالتالي ، فإن جميع BLDC هي في الأساس محركات ثلاثية الطور وتتطلب إجباريًا 3 مراحل لإنتاج عزم الدوران على الدوار.
ماذا يفعل سائقو Sensorless BLDC
تقوم دائرة سائق المستشعر الأقل من BLDC بالكهرباء ببساطة لمجموعات اللف الثلاثة بطريقة متسلسلة بحيث يتمكن الدوار المغناطيسي من المرور عبر قوة معارضة متسقة تمكن المحرك من تحقيق عزم دوران وقوة دورانية مستدامة.
لكن هذا التزويد المتسلسل لملف BLDC بواسطة الدائرة لا يمكن تعيينه عشوائيًا فقط ، بل يجب أن يكون جنبًا إلى جنب أو استجابة لموضع الدوران لمغناطيس الدوار ، وإلا فقد يتحول التنفيذ إلى حالة من السهولة وقد نشهد عمود المحرك (الدوار ) تدور عشوائياً ، أي تتأرجح بين اتجاه عقارب الساعة وعكس اتجاه عقارب الساعة دون دوران معقول.
لماذا تُستخدم المستشعرات في BLDC Motors
لذلك ، نقدم مستشعرات موضوعة داخل العديد من متغيرات محرك BLDC ، هذه المستشعرات (مستشعرات تأثير هول عادةً) `` تفهم '' الوضع المتغير للأقطاب المغناطيسية لمغناطيس الدوار ، وتوجه دائرة المعالج المرفقة لكهربة اللف المقابل وتنفيذ حركة دورانية مع عزم الدوران الأمثل.
يتم استخدام مستشعرات تأثير القاعة بشكل فعال في معظم محركات BLDC ذات الحجم الأكبر نسبيًا ، ولكن بالنسبة للمحركات الأصغر مثل مراوح وحدة المعالجة المركزية ومحركات وحدة المعالجة المركزية ومشغلات أقراص DVD وفي مراوح العادم الصغيرة والمحركات المستخدمة في المروحيات الرباعية ، يمكن أن تصبح مستشعرات تأثير القاعة غير مناسبة وبالتالي يتم تنفيذ نهج بديل أقل من الاستشعار.
يتضمن ذلك استغلال الكهرباء الكهرومغناطيسية الخلفية المتأصلة في الملف والتي يتم أخذها كمصدر مرجعي لمعالجة وكهربة مجموعات اللف ذات الصلة وتنفيذ عزم الدوران.

محاكاة حركة دوار BLDC
في المحاكاة الخام المذكورة أعلاه ، يمكننا أن نتصور كيف يتم أخذ EMF الخلفي المفرج كمرجع واستخدامه لإنتاج نبضات التسلسل لمجموعات اللف اللاحقة ، وفرض عزم دوران على الدوار المركزي للمغناطيس الدائم. قد لا تكون المحاكاة هي النسخ المتماثل بدقة ، لكنها تعطي فكرة تقريبية عن مبدأ العمل.
من المثير للاهتمام ملاحظة أن النبضة يتم تبديلها عندما يكون N / S للمغناطيس بالضبط في مركز قلب الملف ، مما يتيح للملف إما تنشيطه كـ N أو S اعتمادًا على قطبية النبض وإنتاج جذب وصد القوة على مغناطيس N / S ، وبالتالي توليد عزم الدوران المطلوب بأقصى مستوى ممكن.
وهذا بدوره يصبح ممكنًا بسبب EMF الخلفي الذي تم إطلاقه من خلال تبديل الملف السابق.
توضح المناقشة أعلاه عمل مستشعر أقل من محرك BLDC ، والآن دعنا نتعلم كيف تتعامل دائرة معينة مع التنفيذ المعقد أعلاه للتبديل ثلاثي الطور
سائق BLDC DRV10963
بعد بعض البحث في Googling ، وجدت دائرة سائق BLDC بدون مستشعر باستخدام شريحة واحدة DRV10963 تستخدم قدرًا ضئيلًا من الأجزاء في التكوين ومع ذلك فهي قادرة على تنفيذ معالجة معقدة للإجراءات المقصودة.
إن DRV10963 عبارة عن شريحة حديثة تم تصميمها خصيصًا لتشغيل مستشعر أقل من محركات BLDC من خلال توقع EMF الخلفي من لف المحرك وتقديم أمر دقيق على اللف وتحقيق عزم دوران مثالي على الدوار.
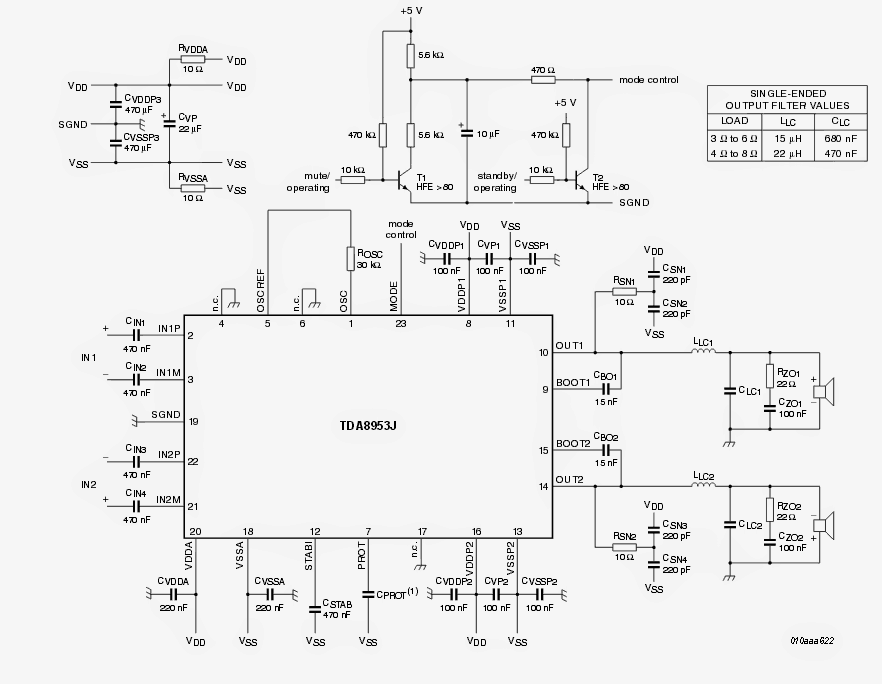
مخطط الرسم البياني

تُظهر الصورة أعلاه تخطيطًا بسيطًا للدائرة والذي يبدو أنه لا يتضمن شيئًا سوى IC نفسه.
يتم تخصيص الدبابيس المختلفة لتنفيذ الوظائف المحددة مثل التحكم في سرعة PWM للمحرك ، والتحكم في الاتجاه ، وما إلى ذلك ببساطة عن طريق تغذية الدبوسات ذات الصلة بالبيانات المحددة من مصدر خارجي.
تُظهر الصورة التالية حزمة الرقاقة ، التي تبدو مثل 10 دبوس DIL IC ، يمكن دراسة وظائف pinout المختلفة لنفسها من البيانات كما هي موضحة في الرسم التخطيطي:

بالإشارة إلى مخطط الدائرة لدائرة سائق BLDC غير المستشعر المقترحة كما هو موضح في المقالة السابقة وكذلك صورة الشريحة أعلاه ، يمكن فهم تفاصيل pinouts على النحو التالي:
تفاصيل IC Pinout
FG = إنه دبوس مؤشر سرعة المحرك (الخرج) ، والذي تم تجهيزه في وضع المجمع المفتوح مع BJT داخلي.
يشير المجمع المفتوح إلى أن الإخراج في هذا pinout سينتج PWMs السلبية من خلال منطق الغرق عبر المجمع المفتوح والأرض ، وبالتالي للحصول على قراءة صحيحة ، سيحتاج المستخدم إلى توصيل مقاوم سحب عبر هذا المجمع المفتوح والإمداد الإيجابي (5V ) لإنجاز إشارة السرعة في هذا pinout.
FGS = إنه مدخل محدد مؤشر السرعة ، مما يعني أنه يمكن إدخال منطق مرتفع أو منخفض هنا لتشغيل / إيقاف تشغيل دبوس المؤشر FG.
Vcc = يجب ألا يتجاوز العرض الإيجابي لـ IC لتمكينه من العمل 5 فولت.
W و U و V هي مخرجات ثلاثية الطور لمحرك BLDC الذي من المفترض أن يتم تشغيله من خلال هذا IC. يعمل هذا أيضًا كمدخلات لاستشعار نبضات المحرك EMF من أجل التبديل المتزامن المطلوب لملفات المحرك.
GND = يشير إلى pinout الإمداد السالب لـ IC فيما يتعلق بدبوس Vdd.
FR = يساعد في تحديد اتجاه المحرك أو التحكم فيه ويمكن تغييره ديناميكيًا في أي وقت بمجرد تشغيل النظام ، وذلك ببساطة عن طريق إدخال منطق خارجي مرتفع أو منطق منخفض.
PWM = يشير إلى إدخال التحكم في PWM من ملف مولد الموجي الخارجي PWM.
قد يكون إدخال PWM متغيرًا لتنفيذ التحكم في السرعة المطلوب لمحرك BLDC المتصل.
تشير المساحة المنقطة في مركز الشريحة إلى الوسادة الحرارية ، والتي يمكن تثبيتها أو الضغط عليها بمبدد حرارة من أجل غرق توليد الحرارة المحتمل على الشريحة أثناء استخدامها مع محرك BLDC محمل.
توضح المناقشة أعلاه تفاصيل التوصيل أو تفاصيل الاتصال الخاصة بشريحة محرك BLDC بدون مستشعر DRV10963 ، والآن دعنا نحلل التكوين الداخلي وعمل الشريحة بالتفصيل بمساعدة النقاط التالية:
وصف الجهاز
DRV10963 عبارة عن مشغل محرك كهربائي بدون مستشعر ثلاثي الأطوار مزود بوحدات ترانزستورات كهربائية مدمجة (ثلاثية الطور H-bridged). إنه مصمم لزيادة الإنتاجية وتقليل الضوضاء والحد الأدنى من وظائف محرك محرك عدد المواد الثانوية. يوفر نظام إدارة الجيوب الأنفية الحصري بدون مستشعر Window-Iess 180 درجة كفاءة تنقل خالية من الضوضاء.
تتكون DRV10963 من وظيفة اكتشاف القفل الذكي ، جنبًا إلى جنب مع دوائر الأمان المدمجة الإضافية لتحقيق أداء آمن. يمكن العثور على DRV10963 في عبوة USON ذات كفاءة حرارية 10-pin مع حصيرة حرارية غير مغطاة.
كيف يعمل IC
منتج DRV10963 عبارة عن مشغل محرك بدون مستشعر ثلاثي الطور مزود بدوائر MOSFET ذات طاقة مغروسة ، إنه كذلك
تم إنشاؤها خصيصًا للأداء الفائق وتقليل الرنين ووظائف محرك المحرك ذات العد الأقل السطحي.
تقدم خطة التحكم الجيبية 180 درجة بدون مستشعرات رئيسية تعمل بدون ضوضاء للمحرك من خلال الحفاظ على تموج عزم الدوران المحفز كهربائيًا. عند التهيئة ، سيقوم جهاز DRV10963 بتشغيل المحرك في الدورة التدريبية المحددة من خلال دبوس إدخال FR.
ستعمل شريحة DRV10963 على محرك BLDC ثلاثي الطور يستخدم خطة تحكم جيبية.
تعتمد أهمية جهد الطور الجيبي المستخدم على دورة عمل دبوس PWM. أثناء تحرك المحرك ، يوفر DRV10963 IC بيانات السرعة عند دبوس FG.
تتكون وحدة DRV10963 من إمكانية استشعار القفل الذكي. في حالة مثل ذلك الذي يكون فيه المحرك متوقفًا عن طريق ضغط خارجي ، سيقوم البرنامج بتحديد مشكلة القفل وسيتخذ تدابير للحماية من تلقاء نفسه مع المحرك.
تم توضيح الإجراء الخاص بدائرة استشعار القفل بالتفصيل في اكتشاف القفل. علاوة على ذلك ، يشتمل DRV10963 IC على العديد من دوائر الأمان المضمنة على سبيل المثال على الحماية الحالية ، وحماية الجهد الزائد ، وحماية الجهد المنخفض ، وحماية درجة الحرارة الزائدة.
شرح مميز
سرعة الإدخال والتحكم
يقدم DRV10963 مخرجات PWM ثلاثية الطور 25-kl-lz والتي قد تحتوي على نسبة معيارية من أشكال الموجة الجيبية من طور إلى آخر. في حالة تحديد أي دورة فيما يتعلق بالأرض ، فمن المحتمل أن يكون شكل الموجة المكتشف عبارة عن شكل جيبي محمي بواسطة PWM مدمج مع التوافقيات من الدرجة الثالثة كما هو موضح في الشكل 2.

تعمل إستراتيجية الترميز هذه على تبسيط مواصفات برنامج التشغيل لسبب أنه من المحتمل أن يكون هناك غالبًا خرج مرحلة واحدة يمكن أن تكون مساوية للصفر.
السعة الناتجة تختلف وفقًا لجهد الإمداد (VCC) ودورة عمل PWM الإلزامية (PWM) على النحو المحدد في المعادلة 1 والموضحة في الشكل 3. يتم تنفيذ السعة المثلى بمجرد أن تكون دورة عمل PWM الموصى بها 100 PERCENT.
Vphpk = PWMdc>

لا يتم تنظيم سرعة المحرك بشكل مباشر من خلال استخدام ترتيب PWM لتنظيم اتساع الفولتية الطورية التي يتم استخدامها للمحرك.
يتم تعديل دورة عمل إدخال PWM إلى كمية رقمية 9 بت (من 0 إلى 511).
قرار التنظيم هو 1/512 == 0.2٪. يعمل محلل دورة العمل على تسهيل عملية تبادل الطلب الأولي بين دورة عمل الإدخال والرقم الرقمي 9 بت.
هذا موضح في الشكل 4 ، حيث r = 80 مللي ثانية.

أداء التبادل بين دورة العمل المطلوبة PWM إلى جانب السعة القصوى للإخراج متغير في جهاز DRV10963.
تتم مناقشة السعة القصوى للنتيجة بواسطة المعادلة 1 عندما يكون الأمر PWM> دورة عمل التشغيل الدنيا. غالبًا ما يتم تحديد أقل دورة عمل للعملية إلى 13٪ أو 10٪ أو 5٪ أو بدون قيود من خلال إعداد OTP (MINOP_DC1: 0).
يوضح الجدول 1 التكوينات الموصى بها لدورة عمل التشغيل الدنيا.
عندما تكون دورة العمل الموصوفة من PWM أقل من أقل دورة عمل تشغيلية وأكثر من 1.5٪ ، سيتم تنظيم الإخراج في دورة عمل التشغيل الدنيا. في أي وقت تكون فيه دورة عمل الإدخال أقل من 1.5٪ ، فمن المحتمل ألا يقوم جهاز DRV10963 بتشغيل الإخراج ، ويتم إرساله إلى وضع الاستعداد.
يمكن توضيح ذلك في الشكل 6.

التكوينات الدورانية
سيبدأ DRV10963 تشغيل المحرك عن طريق تقنية مفصلة بدقة في الشكل 7.

يتكون الرسم البياني لتهيئة المحرك من بدائل قابلة للتهيئة للجهاز للحلقة المفتوحة لإغلاق حد تبديل الحلقة (HOW.) ، ومحاذاة الوقت (TAHQH) ، ومعدل التسريع (RACE).
لمحاذاة الدوار لمنطق التبديل ، ينفذ DRV10963 دورة عمل x٪ على المرحلتين V و W في نفس الوقت يتحكم في المرحلة U في GND.
يستمر هذا السيناريو لثواني TAIign. يتم تحديد أهمية x٪ بواسطة جهد VCC (كما هو موضح في الجدول 2) للحفاظ على عزم دوران وافر على جهد إمداد مختلف.
مع إنجاز تسلسل المحاذاة ، يُجبر المحرك على الإسراع عن طريق وضع الفولتية الطورية الجيبية مع مستويات الذروة كما هو موضح في الجدول 2 والتعزيز عن طريق نطاق التبديل بمعدل توسيع يمثله RACE حتى ينمو مستوى التبديل إلى Hom . ، هرتز.
بمجرد الوصول إلى هذا الحد ، يتحول DRV'l0963 إلى وضع الحلقة المغلقة حيث يتم التعرف على تقدم محرك التبديل من خلال خوارزمية التحكم المدمجة بينما يتم تحديد الجهد المستخدم من خلال إدخال دورة العمل الإلزامي PWM.
الحلقة المفتوحة لإغلاق حد تبديل الحلقة (Hom) ، ووقت المحاذاة (TAHQH) ، ومعدل التسارع (RACE) قابلة للتهيئة من خلال تكوينات OTP.
عادةً ما تتم الموافقة على اختيار عتبة التسليم (HOW ،) عن طريق تقييم التجربة والخطأ. سيكون الهدف هو تفضيل تسامح التسليم الذي يمكن أن يكون أقل ما يمكن وتمكين المحرك من التغيير دون جهد وصدق بين تسارع الحلقة المفتوحة وتسريع الحلقة المغلقة.
تتطلب محركات السرعة المتزايدة بشكل عام (السرعة القصوى) تحملًا فائقًا للتسليم نظرًا لحقيقة أن المحركات عالية السرعة تشتمل على Kt المنخفض وبالتالي BEMF ميسورة التكلفة.
يوضح الجدول 3 التفضيلات القابلة للتكوين لتحمل التسليم. تم إثبات أعلى سرعة في التردد الكهربائي كمرجع للمساعدة في اختيار سرعة التسليم المرغوبة لتقديم معين.

يمكن أن يكون اختيار وقت المحاذاة (TAHQH) والمعدل المتسارع (RACE) مرهونًا بفحص التجربة والخطأ.
تتطلب المحركات ذات القصور الذاتي الأكبر عادةً وقت محاذاة ممتد ومعدل تسريع أكثر بطئًا على عكس المحركات ذات القصور الذاتي المنخفض التي تتطلب عادةً وقت محاذاة أقصر مع نسبة تسريع أسرع. يجب تنفيذ مقايضات البرنامج للاستفادة من استقرار الإطلاق بدلاً من فترة التناوب.
تؤيد TI البدء باتخاذ قرار بشأن التكوينات الأقل كثافة (أبطأ RACE و Tmign المهم) للتنازل عن وقت زيادة عزم الدوران لدعم أقصى معدل للوفاء.
بمجرد تأكيد أداء الجهاز بضمير حي ، يمكن استخدام التكوينات القوية الإضافية (أكبر RACC و TAHQH الأقل) لتقليل لحظة التشغيل وفي نفس الوقت تتبع معدل الإنجاز بحذر.
يعرض الجدول 4 الإعدادات القابلة للتكوين لـ TA'g ، و RACE.

تم تزويد الجزء المتبقي من الشرح المتعلق بهذا BLDC IC غير المستشعر في ورقة البيانات الأصلية هذه
لا تتردد في التعليق لمعرفة المزيد فيما يتعلق بتفاصيل دائرة سائق محرك BLDC غير المستشعر التي تمت مناقشتها أعلاه
زوج من: 12V LED على ظهره امدادات الطاقة الدائرة Next: Quadcopter Remote Control Circuit دون MCU