المقال هو استمرار ل وظيفة سابقة حيث حاولنا إيجاد حل لإنشاء معرفات الأشعة تحت الحمراء الفريدة للقطارات في نظام قاطرة نموذجي. هنا نحاول فهم التطبيق بالتفصيل ومعرفة كيف يمكن تنفيذ الفكرة بنجاح باستخدام دوائر كشف الأشعة تحت الحمراء المضبوطة. الفكرة طلبها السيد هنريك
المواصفات الفنية
عزيزي سواغاتام ،
لماذا لا تعيش في ريبي ، الدنمارك أو أنا في الهند. سيجعل الأمر أسهل بكثير: س)
بما أن لدينا 50 قاطرة على الأقل وسيأتي المزيد ، فأنا متأكد. لن تنجح فكرة تنفيذ 50 وحدة على كل مسار لمحطة القطار ، ولكن ربما يمكننا تقليل عدد الدوائر على كل مسار من خلال السماح لبعض القطارات بالمرور على سبيل المثال. المسار 1 والبعض الآخر على المسار 2 وهكذا. سأتحدث مع ابني عن ذلك.
الحل المثالي هو أن تعرف بالضبط أين ستكون كل قاطرة على القضبان. تستخدم بعض الوحدات من الشركات الكبرى التردد اللاسلكي أو الإشارة الرقمية من خلال المسارات لإبلاغ موقع القطارات. الشيء السيئ الوحيد في وحداتهم هو السعر.
يمتلك معظم الأشخاص مسارًا صغيرًا به عدد قليل من القاطرات ويمكنهم بسهولة تشغيل القطارات النموذجية يدويًا. بلدنا كبير جدًا ولا يمكن للإنسان تتبع 50 قطارًا.
لذلك قمنا بتطوير برنامج لمساعدتنا. على الرغم من أن البرنامج يحتاج إلى بعض المدخلات للعمل كما ذكرت سابقًا. تأتي جميع مدخلات البرنامج من وحدات S88 (تم تطويرها خصيصًا لنموذج مسار القطار من قبل بعض الشركات الألمانية) ، USB ولوحات دوائر I / O المتوازية.
هذا يقودني إلى نقطة أخرى حيث يمكن أن يكون لديك فكرة.
لقد صنعت دائرة صغيرة لتشغيل / إيقاف تشغيل الترانزستورات لتبديل مرحل أو شيء من هذا القبيل. هل لديك فكرة عن دائرة USB محلية الصنع مع مدخلات / مخرجات؟ أحتاج إلى الكثير من المدخلات والمخرجات لأجهزة الكمبيوتر الخاصة بنا.
الآن إلى الطريقة التي تتوقف بها القطارات ، أبطئ وأسرع. تم تجهيز جميع القطارات بجهاز تحكم رقمي ومن خلال المسار تتلقى المعلومات لتسريع وتوقف وتشغيل الأضواء وما إلى ذلك.
يرسل برنامجنا هذه الأوامر من خلال وحدة تحكم رقمية من Märklin (Märklin 60212) متصلة عبر شبكة LAN.
كل هذه المعلومات هي فقط لإعلامك بكيفية عمل الأشياء للقطارات النموذجية.
لذلك لإيقاف قطار ، سأرسل أمرًا من أي جهاز كمبيوتر في منزلنا أو يدويًا عن طريق تحديد معرف القطار وإخباره بالتوقف من وحدة القيادة 60212.
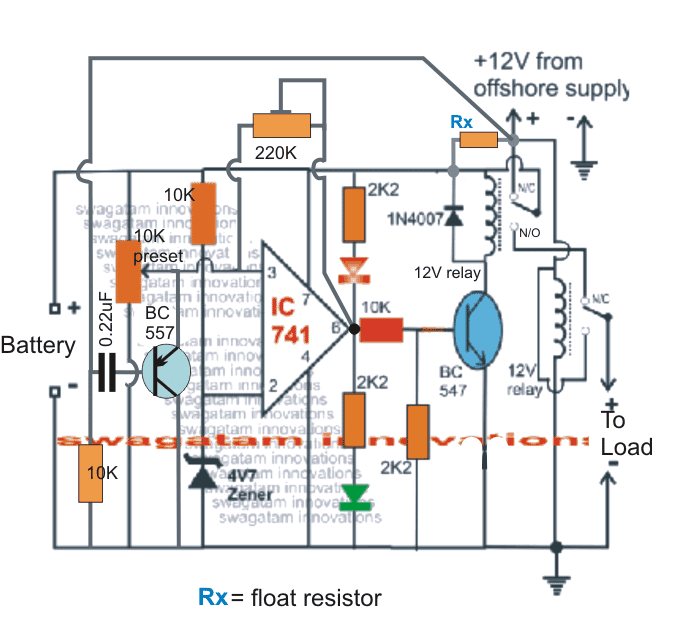
وحدة RX هي المتلقي الصحيح؟ إذا كانت الإجابة بنعم ، فيجب أن يكونوا تحت المسارات ووحدة TX في القطار. يجب أن تقوم وحدة RX عند اقتراب القطار بتبديل منفذ S88 أو المنفذ الموجود على USB أو لوحة الواجهة المتوازية بالأرض.
يشاهد برنامجي لوحات S88 و USB والواجهة المتوازية ويعمل على منفذ بتبديل إلى الأرض. آمل أن تتمكن من فهم توضيحي. لذلك إذا كان بإمكان دائرتك أن تخبر الكمبيوتر ، فقد تم تحليل قطار معين. يمكن للكمبيوتر إرسال الأوامر.
ربما يكون مرشح تمرير النطاق حلاً. على الرغم من أن الكمبيوتر لا يعرف أي قطار يجب أن يتوقف أم أنني أفهم هذا الخطأ؟ ولكن يمكن استخدام مرشح تمرير النطاق في المزيد من الأماكن في مسارات القطارات النموذجية. على سبيل المثال. للتبديل بين عمليات الانتقال وغيرها الكثير.
أعتقد أن 8-10 قطارات محددة مسبقًا كافية.
أعتقد أنني لم أشرح نفسي بشكل صحيح. ترى دائرة الواجهة المتصلة بالكمبيوتر تكتشف عندما يتم تحويل منفذ الإدخال إلى الأرض. تقوم معظم لوحات الواجهة لأجهزة الكمبيوتر بذلك على حد علمي.
لقد أضفت ملفًا يحتوي على مخططات لوحة الواجهة من Velleman. هذا مجرد مثال على لوحة الواجهة.
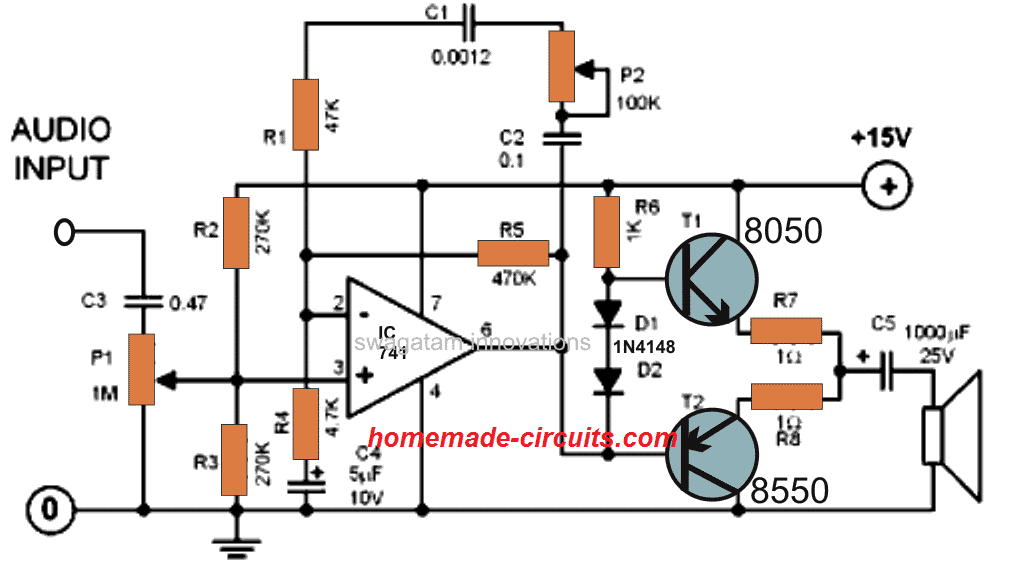
كان هذا ما قصدته بالتبديل إلى الأرض. ألا يمكن أن يتم ذلك باستخدام ترانزستور BC 547 NPN على خرج دائرتك؟
إنه في الأساس مجرد معرفة القطار الذي يقترب من أي محطة. كيف تصل المعلومات إلى الكمبيوتر ، لست متأكدًا من الأفضل. تبدو فكرة الاتصال اللاسلكي جيدة ، لكن هل هي قابلة للتنفيذ؟
كانت فكرتي منذ البداية شيئًا مثل دائرة يمكنها إعلام الكمبيوتر عبر لوحة واجهة أي قطار يقترب من أي محطة.
على الرغم من وجود مشكلة واحدة كبيرة حول استخدام لوحات الواجهة. كم عدد اللوحات المطلوبة وعددها الذي يمكن توصيله بجهاز كمبيوتر واحد.
إذا نظرت إلى مخططات Velleman K8055 ، فهناك مدخلين تناظريين 0-5V ، فربما يمكن استخدامها.
Swagatam أنا أحب طريقة تفكيرك. البحث عن حلول وليس مجرد الإقلاع عن التدخين. في الحقيقة أعتقد أنه يمكنك جني أموال جيدة من داراتك في أوروبا. اعتاد هواة نماذج القطارات على دفع الكثير مقابل مشترياتهم.
تحياتي الحارة،
هنريك لوريسن
حل الدائرة:
يمكن مشاهدة اثنين من خيارات الدائرة للكشف المقترح أدناه ، ويمكن تجربة أي منها:


يمكن استخدام كلتا الدائرتين لأي تطبيق يتطلب الكشف عن الأشعة تحت الحمراء المضبوط بشكل فريد كما هو الحال في جهاز التحكم عن بعد بالأشعة تحت الحمراء أو أنظمة أمان الأشعة تحت الحمراء أو الأجهزة الرئيسية والقفل القائم على الأشعة تحت الحمراء.
تستخدم الدائرة الأولى شريحة LM567 للكشف عن تردد الحلقة المغلقة لتشكيل دائرة المستقبل.
تقوم R2 / R3 / C2 بإصلاح تردد الإغلاق لـ IC بحيث تستجيب الدائرة وتخلق خرجًا منطقيًا صفريًا عند اكتشاف هذا التردد عند إدخال pin3 الخاص به عبر الثنائي الضوئي.
يتم تشغيل الصمام الضوئي بواسطة دارة مستقرة تستند إلى 555 تظهر على يسار المخططات. تستخدم الدائرة 555 أيضًا الصمام الثنائي للصور لنقل التردد عبر جهاز استقبال الصمام الثنائي للصور LM567.
يجب ضبط جهاز الإرسال 555 تمامًا على التردد الذي تم ضبطه باستخدام R2 / R3 / C2 في دائرة LM567. يتم تجاهل أي شيء آخر ببساطة بواسطة دائرة Rx.
في الدائرة الثانية للكشف عن الأشعة تحت الحمراء المضبوطة ، يتم استخدام أداة ضبط LC لاستقبال استجابة لتردد جهاز الإرسال المضبوط بشكل فريد.
حلقة تعليقات L1 / C1
تحدد حلقة التغذية الراجعة L1 / C1 الموضوعة عبر منافذ إدخال خرج opamp تردد رنين الإغلاق الذي قد يكون من المفترض أن يتم الإمساك به.
قد يتم تعديل L1 / C1 بشكل مناسب لتحقيق ترددات مضبوطة فريدة أخرى لتنفيذ إجراءات القفل.
هنا أيضًا ، يتم استخدام 555 ثابتًا كجهاز إرسال IR لتشغيل دائرة opamp Rx.
عند اكتشاف تردد مطابق من 555 Tx ، يستجيب opamp ويخلق منطقًا منخفضًا عند طرف الإخراج الخاص به والذي قد يتكامل بشكل أكبر مع جهاز خارجي للعمليات المحددة.
يمكن استخدام الدائرة المذكورة أعلاه بشكل مناسب لاكتشاف معرف القطار المقترح ، وقد يتم وضع 8 وحدات Rx على المسارات ، ووحدات 555 Tx في كل قطار ، بحيث يكون عدد القطارات المختار بشكل فريد مع Txs الفريدة التي تم اكتشافها بواسطة مستقبلات Rx ويتم إرسال معلومات المنطق المنخفضة المقابلة إلى الكمبيوتر لإبلاغ المستخدم بوجودها.
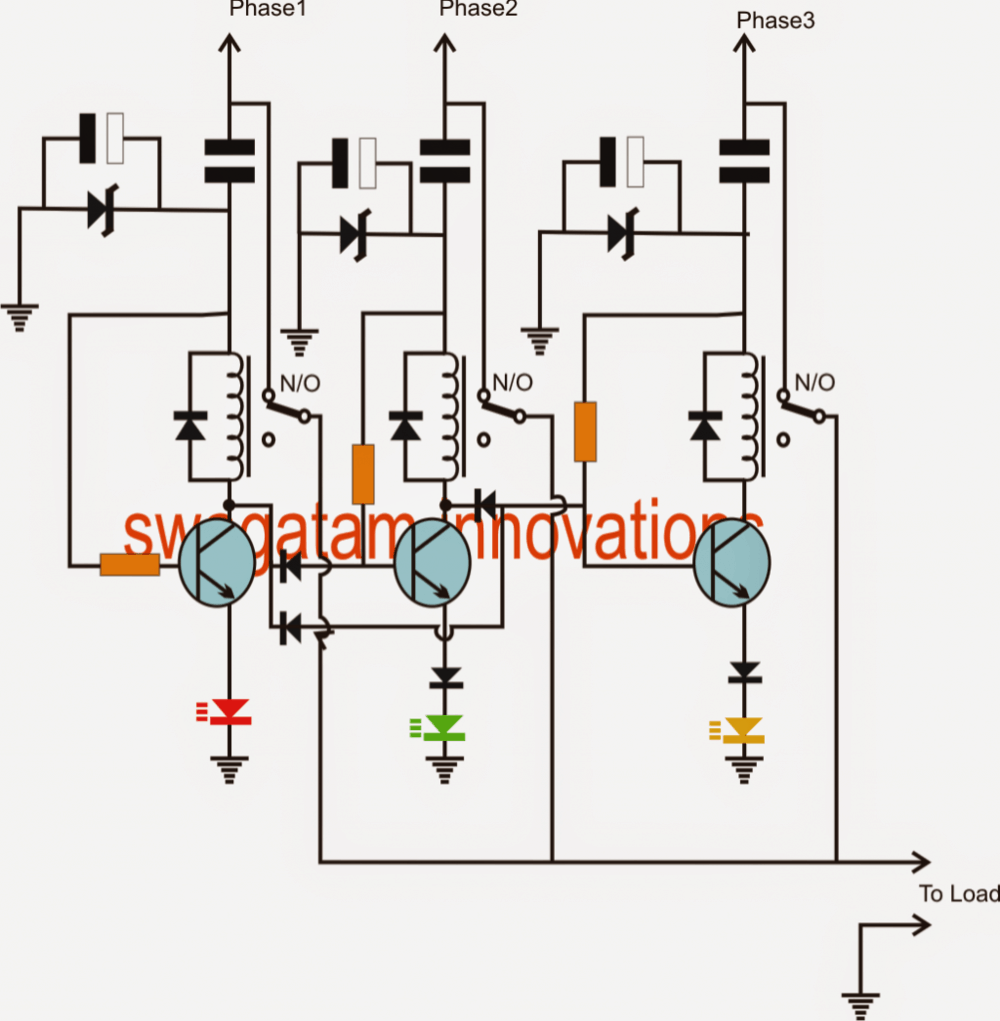
زوج من: دائرة إنذار مستشعر الظل البسيطة التالي: وميض 3 مصابيح LED (R ، G ، B) بالتتابع باستخدام دائرة Arduino