دائرة الذراع الآلية هذه والتي يمكن تنفيذها أيضًا مثل الرافعة الآلية ، تعمل باستخدام 6 محركات مؤازرة ويمكن التحكم فيها من خلال جهاز التحكم عن بعد متحكم ، باستخدام رابط اتصال 2.4 جيجا هرتز قائم على Arduino.
الخصائص الرئيسية
عندما تقوم ببناء شيء معقد مثل الذراع الآلية ، يجب أن يبدو حديثًا ويجب أن يتضمن العديد من الميزات المتقدمة ، وليس مجرد لعبة مثل الوظائف.
من السهل نسبيًا بناء التصميم الكامل المقترح ، ومع ذلك يُعزى إلى بعض وظائف المناورة المتقدمة ، والتي يمكن التحكم فيها بدقة من خلال الأوامر اللاسلكية أو التحكم عن بعد. التصميم متوافق حتى مع الاستخدام الصناعي ، إذا تمت ترقية المحركات بشكل مناسب.
السمات الرئيسية لهذه الرافعة الميكانيكية مثل الذراع الآلية هي:
- قابل للتعديل باستمرار 'ذراع' على محور عمودي 180 درجة.
- قابل للتعديل باستمرار 'الكوع' على محور عمودي 180 درجة.
- قابل للتعديل باستمرار 'قرصة الإصبع' أو قبضة على محور عمودي 90 درجة.
- ذراع قابل للتعديل باستمرار على مستوى أفقي 180 درجة.
- النظام الآلي بأكمله أو ذراع الرافعة متحرك ومناورة مثل a سيارة التحكم عن بعد .
محاكاة العمل الخام
يمكن عرض وفهم بعض الميزات الموضحة أعلاه بمساعدة محاكاة GIF التالية:

مواقف آلية المحرك
يعطينا الشكل التالي صورة واضحة عن أوضاع المحرك المختلفة وآليات التروس المرتبطة بها والتي يجب تثبيتها لتنفيذ المشروع:

في هذا التصميم ، نتأكد من إبقاء الأمور بسيطة قدر الإمكان حتى يتمكن حتى الشخص العادي من فهم آليات المحرك / التروس المعنية. ولا يبقى شيء مخفي وراء الآليات المعقدة.
يمكن فهم عمل أو وظيفة كل محرك بمساعدة النقاط التالية:
- يتحكم المحرك رقم 1 في 'قرصة الإصبع' أو نظام إمساك الروبوت. يتم تثبيت العنصر المتحرك بشكل مباشر مع عمود المحرك للحركات.
- يتحكم المحرك رقم 2 في آلية الكوع للنظام. تم تكوينه بحافة بسيطة لنظام التروس egde لتنفيذ حركة الرفع.
- المحرك رقم 3 مسؤول عن رفع نظام الذراع الآلية بالكامل عموديًا ، لذلك يجب أن يكون هذا المحرك أقوى من المحركين أعلاه. تم دمج هذا المحرك أيضًا باستخدام آلية التروس لتقديم الإجراءات المطلوبة.
- يتحكم المحرك رقم 4 في آلية الرافعة بالكامل على مستوى أفقي كامل بزاوية 360 درجة ، بحيث يكون الذراع قادرًا على التقاط أو رفع أي شيء داخل كامل في اتجاه عقارب الساعة أو عكس اتجاه عقارب الساعة نطاق شعاعي.
- يعمل المحرك رقم 5 و 6 كعجلات للمنصة التي تحمل النظام بأكمله. يمكن التحكم في هذه المحركات عن طريق تحريك النظام من مكان إلى آخر دون عناء ، كما أنه يسهل حركة الشرق / الغرب ، والشمال / الجنوب للنظام ببساطة عن طريق ضبط سرعات المحركات اليسرى / اليمنى. يتم ذلك ببساطة عن طريق تقليل أو إيقاف أحد المحركين ، على سبيل المثال لبدء انعطاف الجانب الأيمن ، يمكن إيقاف محرك الجانب الأيمن أو إيقافه حتى يتم تنفيذ الدوران بالكامل أو إلى الزاوية المطلوبة. وبالمثل ، لبدء الانعطاف إلى اليسار ، افعل الشيء نفسه مع المحرك الأيسر.
لا تحتوي العجلة الخلفية على أي محرك مرتبط بها ، فهي تتوقف على التحرك بحرية على محورها المركزي وتتبع مناورات العجلة الأمامية.
دائرة الاستقبال اللاسلكي
نظرًا لأن النظام بأكمله مصمم للعمل مع جهاز تحكم عن بعد ، يجب تكوين جهاز استقبال لاسلكي مع المحركات الموضحة أعلاه. ويمكن القيام بذلك باستخدام دائرة Arduino التالية.

كما ترى ، هناك 6 محركات مؤازرة مرفقة بمخرجات Arduino ويتم التحكم في كل منها من خلال الإشارات التي يتم التحكم فيها عن بُعد الملتقطة بواسطة المستشعر المرفق NRF24L01.
تتم معالجة الإشارات بواسطة هذا المستشعر وتغذيتها إلى Arduino الذي يوفر المعالجة للمحرك ذي الصلة لعمليات التحكم في السرعة المقصودة.
يتم إرسال هذه الإشارات من دائرة إرسال بها مقاييس فرق الجهد. يتحكم الضبط الموجود على مقياس الجهد هذا في مستويات السرعة على المحركات المترابطة المرتبطة بدائرة المستقبل الموضحة أعلاه.
الآن لنرى كيف تبدو دائرة الإرسال:
وحدة الارسال

يمكن رؤية تصميم جهاز الإرسال به 6 مقاييس جهد متصلة بلوحة Arduino وأيضًا بجهاز ارتباط اتصال 2.4 جيجا هرتز آخر.
كل من الأواني مبرمجة ل التحكم في المحرك المقابل المرتبطة بدائرة الاستقبال. لذلك عندما يقوم المستخدم بتدوير عمود مقياس الجهد المحدد لجهاز الإرسال ، يبدأ المحرك المقابل للذراع الآلي في التحرك وتنفيذ الإجراءات اعتمادًا على موقعه المحدد على النظام.
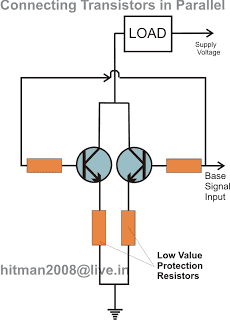
التحكم في التحميل الزائد للمحرك
قد تتساءل كيف تحد المحركات من حركتها عبر نطاقاتها المنقولة ، نظرًا لأن النظام لا يحتوي على أي ترتيب محدد لمنع المحرك من التحميل الزائد بمجرد وصول حركات الآلية المعنية إلى نقاط النهاية الخاصة بها؟
بمعنى ، على سبيل المثال ، ماذا يحدث إذا لم يتم إيقاف المحرك حتى بعد تثبيت 'المقبض' على الجسم بإحكام؟
أسهل حل لذلك هو إضافة فرد وحدات التحكم الحالية مع كل من المحركات بحيث يظل المحرك في مثل هذه الحالات قيد التشغيل ومغلقًا دون حرق أو تحميل زائد.
نظرًا للتحكم في التيار النشط ، لا تمر المحركات بحمل زائد أو ظروف تيار زائد ، وتستمر في العمل ضمن نطاق آمن محدد.
يمكن العثور على رمز البرنامج الكامل في هذه المقالة
السابق: مضخم صوت USB 5V لمكبرات الصوت للكمبيوتر الشخصي التالي: تم استكشاف 7 دوائر عاكس موجة جيبية معدلة - 100W إلى 3kVA