
كما يوحي الاسم ، ستقدم هذه المقالة فكرة دقيقة عن هيكل وعمل وحدة التحكم PID. ومع ذلك ، عند الدخول في التفاصيل ، دعنا نحصل على مقدمة حول وحدات تحكم PID. توجد وحدات تحكم PID في مجموعة واسعة من التطبيقات للتحكم في العمليات الصناعية. ما يقرب من 95٪ من عمليات الحلقة المغلقة لملف الأتمتة الصناعية استخدام القطاع وحدات تحكم PID. PID تعني مشتق تكاملي متناسب. يتم الجمع بين وحدات التحكم الثلاثة هذه بطريقة تنتج إشارة تحكم. كوحدة تحكم في التغذية الراجعة ، فهي توفر إخراج التحكم بالمستويات المطلوبة. قبل اختراع المعالجات الدقيقة ، تم تنفيذ التحكم PID بواسطة المكونات الإلكترونية التناظرية. ولكن اليوم تتم معالجة جميع وحدات التحكم PID بواسطة المعالجات الدقيقة. وحدات تحكم منطقية قابلة للبرمجة لديك أيضًا تعليمات تحكم PID يحمل في ثناياه عوامل. نظرًا لمرونة وموثوقية وحدات التحكم PID ، فإنها تُستخدم تقليديًا في تطبيقات التحكم في العمليات.
ما هي وحدة تحكم PID؟
يشير المصطلح PID إلى مشتق متكامل نسبي وهو نوع واحد من الأجهزة المستخدمة للتحكم في متغيرات العملية المختلفة مثل الضغط والتدفق ودرجة الحرارة والسرعة في التطبيقات الصناعية. في وحدة التحكم هذه ، يتم استخدام جهاز تغذية مرتدة حلقة التحكم لتنظيم جميع متغيرات العملية.
يستخدم هذا النوع من التحكم لقيادة نظام في اتجاه موقع موضوعي خلاف ذلك المستوى. إنه موجود في كل مكان تقريبًا للتحكم في درجة الحرارة ويستخدم في العمليات العلمية والأتمتة والمواد الكيميائية التي لا تعد ولا تحصى. في وحدة التحكم هذه ، يتم استخدام ردود الفعل ذات الحلقة المغلقة للحفاظ على المخرجات الحقيقية من طريقة مثل قريبة من الهدف وإلا خرج عند نقطة التثبيت إن أمكن. في هذه المقالة ، تمت مناقشة تصميم وحدة التحكم PID مع أوضاع التحكم المستخدمة فيها مثل P و I & D.
التاريخ
تاريخ وحدة التحكم PID هو ، في عام 1911 ، تم تطوير أول وحدة تحكم PID بواسطة Elmer Sperry. بعد ذلك ، تم تنفيذ TIC (شركة Taylor Instrumental) لوحدة تحكم هوائية سابقة قابلة للضبط تمامًا في عام 1933. بعد بضع سنوات ، أزال مهندسو التحكم خطأ الحالة المستقرة الموجود داخل وحدات التحكم النسبية من خلال إعادة ضبط النهاية إلى بعض القيمة الزائفة حتى يصبح الخطأ ليس صفراً.
تضمنت عملية إعادة الضبط الخطأ الذي يُعرف باسم وحدة التحكم التناسبية المتكاملة. بعد ذلك ، في عام 1940 ، تم تطوير أول متحكم PID هوائي من خلال إجراء مشتق لتقليل مشاكل التجاوز.
في عام 1942 ، أدخلت Ziegler & Nichols قواعد الضبط لاكتشاف وتعيين المعلمات المناسبة لوحدات تحكم PID بواسطة المهندسين. أخيرًا ، تم استخدام وحدات التحكم الأوتوماتيكية PID على نطاق واسع في الصناعات في منتصف عام 1950.
مخطط كتلة وحدة تحكم PID
يشتمل نظام الحلقة المغلقة مثل وحدة التحكم PID على نظام تحكم في التغذية الراجعة. يقوم هذا النظام بتقييم متغير التغذية المرتدة باستخدام نقطة ثابتة لتوليد إشارة خطأ. بناءً على ذلك ، فإنه يغير إخراج النظام. سيستمر هذا الإجراء حتى يصل الخطأ إلى الصفر وإلا تصبح قيمة متغير التغذية المرتدة مكافئة لنقطة ثابتة.
توفر وحدة التحكم هذه نتائج جيدة مقارنة بوحدة التحكم من النوع ON / OFF. في وحدة التحكم من النوع ON / OFF ، يمكن الحصول على شرطين فقط لإدارة النظام. بمجرد أن تكون قيمة العملية أقل من النقطة الثابتة ، سيتم تشغيلها. وبالمثل ، سيتم إيقاف تشغيله بمجرد أن تكون القيمة أعلى من قيمة ثابتة. الإخراج غير مستقر في هذا النوع من أجهزة التحكم وسوف يتأرجح بشكل متكرر في منطقة النقطة الثابتة. ومع ذلك ، فإن وحدة التحكم هذه أكثر ثباتًا ودقة مقارنة بوحدة التحكم من النوع ON / OFF.

عمل وحدة تحكم PID
عمل وحدة تحكم PID
باستخدام وحدة تحكم ON-OFF بسيطة منخفضة التكلفة ، يمكن فقط حالتين للتحكم ، مثل التشغيل الكامل أو الإيقاف الكامل. يتم استخدامه لتطبيق تحكم محدود حيث تكون حالتا التحكم هاتان كافيتان لهدف التحكم. ومع ذلك ، فإن الطبيعة المتذبذبة لعنصر التحكم هذا تحد من استخدامه وبالتالي يتم استبداله بوحدات تحكم PID.
تحافظ وحدة تحكم PID على الإخراج بحيث لا يوجد خطأ صفري بين متغير العملية ونقطة الضبط / الإخراج المطلوب بواسطة عمليات الحلقة المغلقة. يستخدم PID ثلاثة سلوكيات تحكم أساسية موضحة أدناه.
ع- تحكم
التناسب أو P- المراقب يعطي مخرجات تتناسب مع الخطأ الحالي e (t). يقارن النقطة المرغوبة أو المحددة بالقيمة الفعلية أو قيمة عملية التغذية الراجعة. يتم ضرب الخطأ الناتج بثابت متناسب للحصول على الناتج. إذا كانت قيمة الخطأ صفراً ، فإن خرج وحدة التحكم هذا هو صفر.

P- تحكم
تتطلب وحدة التحكم هذه انحيازًا أو إعادة تعيين يدويًا عند استخدامها بمفردها. هذا لأنه لا يصل أبدًا إلى حالة الاستقرار. إنه يوفر عملية مستقرة ولكنه يحافظ دائمًا على خطأ الحالة المستقرة. تزداد سرعة الاستجابة عندما يزيد الثابت النسبي Kc.

استجابة P-Controller
I- تحكم
نظرًا لقيود وحدة التحكم p حيث يوجد دائمًا إزاحة بين متغير العملية ونقطة الضبط ، هناك حاجة إلى وحدة التحكم I ، والتي توفر الإجراء اللازم لإزالة خطأ الحالة المستقرة. يقوم بدمج الخطأ خلال فترة زمنية حتى تصل قيمة الخطأ إلى الصفر. إنها تحمل القيمة إلى جهاز التحكم النهائي الذي يصبح فيه الخطأ صفراً.

تحكم PI
يقلل التحكم المتكامل من إنتاجه عند حدوث خطأ سلبي. يحد من سرعة الاستجابة ويؤثر على استقرار النظام. يتم زيادة سرعة الاستجابة عن طريق تقليل الكسب المتكامل ، كي.

استجابة تحكم PI
في الشكل أعلاه ، مع انخفاض مكاسب وحدة التحكم I ، يستمر خطأ الحالة المستقرة أيضًا في التناقص. بالنسبة لمعظم الحالات ، يتم استخدام وحدة تحكم PI خاصة عندما لا تكون الاستجابة عالية السرعة مطلوبة.
أثناء استخدام وحدة تحكم PI ، يقتصر إخراج جهاز التحكم على النطاق إلى حد ما للتغلب على تكامل الرياح الظروف التي يزداد فيها الناتج المتكامل حتى في حالة الخطأ الصفري ، بسبب عدم الخطية في المصنع.
D- تحكم
ليس لدى I-controller القدرة على توقع السلوك المستقبلي للخطأ. لذلك يتفاعل بشكل طبيعي بمجرد تغيير نقطة الضبط. يتغلب D-controller على هذه المشكلة من خلال توقع السلوك المستقبلي للخطأ. يعتمد ناتجها على معدل تغير الخطأ فيما يتعلق بالوقت ، مضروبًا في مشتق ثابت. يعطي انطلاقة للمخرج وبالتالي زيادة استجابة النظام.

تحكم PID
في استجابة الشكل أعلاه لـ D ، تكون وحدة التحكم أكثر ، مقارنةً بوحدة التحكم PI ، كما يتم تقليل وقت استقرار الإنتاج. إنه يحسن استقرار النظام عن طريق تعويض تأخر الطور الناتج عن وحدة التحكم I. زيادة كسب المشتق يزيد من سرعة الاستجابة.

استجابة تحكم PID
لذا لاحظنا أخيرًا أنه من خلال الجمع بين وحدات التحكم الثلاثة هذه ، يمكننا الحصول على الاستجابة المطلوبة للنظام. تصمم الشركات المصنعة المختلفة خوارزميات PID مختلفة.
أنواع متحكم PID
يتم تصنيف وحدات التحكم PID إلى ثلاثة أنواع مثل وحدات التحكم ON / OFF ، والمتناسبة ، والمعيارية. تستخدم وحدات التحكم هذه بناءً على نظام التحكم ، يمكن للمستخدم استخدام وحدة التحكم لتنظيم الطريقة.
ON / OFF التحكم
طريقة التحكم في التشغيل والإيقاف هي أبسط أنواع الأجهزة المستخدمة للتحكم في درجة الحرارة. قد يكون خرج الجهاز في وضع التشغيل / الإيقاف من خلال عدم وجود حالة مركزية. ستقوم وحدة التحكم هذه بتشغيل الإخراج بمجرد عبور درجة الحرارة للنقطة الثابتة. وحدة التحكم المحدودة هي نوع معين من وحدات التحكم في التشغيل / الإيقاف التي تستخدم مرحل مزلاج. تتم إعادة ضبط هذا المرحل يدويًا ويستخدم لإيقاف تشغيل طريقة بمجرد الوصول إلى درجة حرارة معينة.
التحكم النسبي
تم تصميم هذا النوع من أجهزة التحكم لإزالة الدوران المتصل من خلال التحكم في التشغيل / الإيقاف. ستعمل وحدة التحكم PID هذه على تقليل الطاقة العادية التي يتم توفيرها نحو السخان بمجرد وصول درجة الحرارة إلى النقطة الثابتة.
تتميز وحدة التحكم هذه بميزة واحدة للتحكم في السخان بحيث لا تتجاوز النقطة الثابتة ولكنها ستصل إلى النقطة الثابتة للحفاظ على درجة حرارة ثابتة.
يمكن تحقيق هذا الفعل التناسبي من خلال تشغيل وإيقاف الإخراج لفترات زمنية صغيرة. سيؤدي هذا التناسب الزمني إلى تغيير النسبة من وقت التشغيل إلى وقت إيقاف التشغيل للتحكم في درجة الحرارة.
وحدة تحكم PID من النوع القياسي
سيدمج هذا النوع من أجهزة التحكم PID التحكم النسبي من خلال التحكم المتكامل والمشتق لمساعدة الوحدة تلقائيًا على تعويض التعديلات داخل النظام. يتم التعبير عن هذه التعديلات ، التكامل والمشتق في وحدات زمنية.
تتم إحالة وحدات التحكم هذه أيضًا من خلال المعاملة بالمثل ، RATE & RESET في المقابل. يجب تعديل شروط PID بشكل منفصل وإلا يتم ضبطها على نظام معين مع التجربة وكذلك الخطأ. ستوفر وحدات التحكم هذه التحكم الأكثر دقة وثباتًا للأنواع الثلاثة من أجهزة التحكم.
تحكم PID في الوقت الحقيقي
في الوقت الحاضر ، هناك أنواع مختلفة من أجهزة التحكم PID المتوفرة في السوق. تستخدم وحدات التحكم هذه لمتطلبات التحكم الصناعي مثل الضغط ودرجة الحرارة والمستوى والتدفق. بمجرد التحكم في هذه المعلمات من خلال PID ، تشتمل الاختيارات على وحدة تحكم PID منفصلة أو إما PLC.
يتم استخدام وحدات التحكم المنفصلة هذه في أي مكان يلزم فيه فحص حلقتين ، بالإضافة إلى التحكم فيها بطريقة أخرى في الظروف التي تكون فيها معقدة إلى حق الدخول من خلال أنظمة أكبر.
توفر أجهزة التحكم هذه خيارات مختلفة للتحكم المنفرد والمزدوج. توفر وحدات تحكم PID المستقلة من النوع العديد من تكوينات النقطة الثابتة لإنتاج العديد من الإنذارات المستقلة.
تتكون وحدات التحكم المستقلة هذه بشكل أساسي من وحدات تحكم PID من شركة Honeywell ، وأجهزة التحكم في درجة الحرارة من Yokogawa ، وأجهزة التحكم في الضبط التلقائي من OMEGA ، و Siemens ، و ABB.
تُستخدم PLCs مثل وحدات التحكم PID في معظم تطبيقات التحكم الصناعية. يمكن إجراء ترتيب كتل PID داخل PACs أو PLCs لإعطاء خيارات فائقة للتحكم الدقيق PLC. تعتبر وحدات التحكم هذه أكثر ذكاءً وقوة مقارنة بوحدات التحكم المنفصلة. يتضمن كل PLC كتلة PID داخل برمجة البرنامج.
طرق الضبط
قبل أن يتم تشغيل وحدة التحكم PID ، يجب ضبطها لتلائم ديناميكيات العملية المراد التحكم فيها. يعطي المصممون القيم الافتراضية للمصطلحات P و I و D ، وهذه القيم لا يمكن أن تعطي الأداء المطلوب وتؤدي أحيانًا إلى عدم الاستقرار وبطء أداء التحكم. تم تطوير أنواع مختلفة من طرق الضبط لضبط وحدات التحكم PID وتتطلب الكثير من الاهتمام من المشغل لتحديد أفضل قيم المكاسب النسبية والتكاملية والمشتقة. وترد أدناه بعض هذه.
تُستخدم وحدات التحكم PID في معظم التطبيقات الصناعية ، ولكن يجب أن يعرف المرء إعدادات وحدة التحكم هذه لضبطها بشكل صحيح لتوليد الإخراج المفضل. هنا ، الضبط ليس سوى إجراء لتلقي رد مثالي من وحدة التحكم من خلال تحديد أفضل المكاسب النسبية والعوامل التكاملية والمشتقة.
يمكن الحصول على الإخراج المطلوب لوحدة التحكم PID عن طريق ضبط وحدة التحكم. هناك تقنيات مختلفة متاحة للحصول على المخرجات المطلوبة من وحدة التحكم مثل منحنى التجربة والخطأ و Zeigler-Nichols ومنحنى تفاعل العملية. الأساليب الأكثر استخدامًا هي التجربة والخطأ ، زيجلر نيكولز ، إلخ.
طريقة التجربة والخطأ: إنها طريقة بسيطة لضبط وحدة تحكم PID. أثناء عمل النظام أو وحدة التحكم ، يمكننا ضبط وحدة التحكم. في هذه الطريقة ، أولاً ، يتعين علينا ضبط قيم Ki و Kd على الصفر وزيادة المصطلح النسبي (Kp) حتى يصل النظام إلى سلوك متذبذب. بمجرد أن يتأرجح ، اضبط Ki (مصطلح متكامل) بحيث تتوقف التذبذبات وأخيراً اضبط D للحصول على استجابة سريعة.
تقنية منحنى عملية رد الفعل: إنها تقنية ضبط الحلقة المفتوحة. ينتج استجابة عند تطبيق إدخال خطوة على النظام. في البداية ، يتعين علينا تطبيق بعض مخرجات التحكم على النظام يدويًا وعلينا تسجيل منحنى الاستجابة.
بعد ذلك ، نحتاج إلى حساب الميل ، والوقت الميت ، ووقت صعود المنحنى ، وأخيراً استبدال هذه القيم في معادلات P و I و D للحصول على قيم الكسب لشروط PID.

منحنى تفاعل العملية
طريقة زيجلر نيكولز: اقترح Zeigler-Nichols طرق الحلقة المغلقة لضبط وحدة تحكم PID. هذه هي طريقة التدوير المستمر وطريقة التذبذب المخمد. الإجراءات لكلتا الطريقتين هي نفسها ولكن سلوك التذبذب مختلف. في هذا ، أولاً ، يتعين علينا ضبط ثابت p-controller ، Kp على قيمة معينة بينما قيم Ki و Kd تساوي صفرًا. يتم زيادة الكسب النسبي حتى يتأرجح النظام بسعة ثابتة.
يُطلق على الكسب الذي ينتج عنه النظام تذبذبات ثابتة الكسب النهائي (Ku) وتسمى فترة التذبذبات الفترة النهائية (Pc). بمجرد الوصول إليه ، يمكننا إدخال قيم P و I و D في وحدة تحكم PID بواسطة جدول Zeigler-Nichols الذي يعتمد على وحدة التحكم المستخدمة مثل P أو PI أو PID ، كما هو موضح أدناه.

طاولة زيجلر نيكولز
هيكل تحكم PID
تتكون وحدة التحكم PID من ثلاثة شروط ، وهي التحكم النسبي والتكامل والمشتق. يعطي التشغيل المشترك لوحدات التحكم الثلاثة هذه استراتيجية تحكم للتحكم في العملية. تتعامل وحدة التحكم PID مع متغيرات العملية مثل الضغط والسرعة ودرجة الحرارة والتدفق وما إلى ذلك. تستخدم بعض التطبيقات وحدات تحكم PID في شبكات التسلسل حيث يتم استخدام اثنين أو أكثر من وحدات التحكم PID لتحقيق التحكم.

هيكل وحدة تحكم PID
يوضح الشكل أعلاه هيكل وحدة تحكم PID. يتكون من كتلة PID التي تعطي ناتجها إلى كتلة العملية. تتكون العملية / المصنع من أجهزة التحكم النهائية مثل المشغلات وصمامات التحكم وأجهزة التحكم الأخرى للتحكم في العمليات المختلفة للصناعة / المصنع.
تتم مقارنة إشارة التغذية المرتدة من مصنع المعالجة بنقطة ضبط أو إشارة مرجعية u (t) ويتم تغذية إشارة الخطأ المقابلة e (t) إلى خوارزمية PID. وفقًا لحسابات التحكم النسبي والتكامل والمشتق في الخوارزمية ، تنتج وحدة التحكم استجابة مشتركة أو ناتجًا متحكمًا يتم تطبيقه على أجهزة التحكم في المصنع.
لا تحتاج جميع تطبيقات التحكم إلى عناصر التحكم الثلاثة. غالبًا ما يتم استخدام مجموعات مثل عناصر تحكم PI و PD في التطبيقات العملية.
التطبيقات
تتضمن تطبيقات تحكم PID ما يلي.
أفضل تطبيق للتحكم في PID هو التحكم في درجة الحرارة حيث تستخدم وحدة التحكم مدخلات مستشعر درجة الحرارة ويمكن ربط ناتجها بعنصر تحكم مثل مروحة أو سخان. بشكل عام ، تعد وحدة التحكم هذه مجرد عنصر واحد في نظام التحكم في درجة الحرارة. يجب فحص النظام بأكمله وكذلك النظر فيه أثناء اختيار وحدة التحكم الصحيحة.
التحكم في درجة حرارة الفرن
بشكل عام ، يتم استخدام الأفران لتشمل التدفئة بالإضافة إلى احتواء كمية كبيرة من المواد الخام في درجات حرارة عالية. من المعتاد أن تشتمل المادة المشغولة على كتلة ضخمة. وبالتالي ، يتطلب الأمر قدرًا كبيرًا من القصور الذاتي ولا تتغير درجة حرارة المادة بسرعة حتى عند تطبيق حرارة هائلة. ينتج عن هذه الميزة إشارة PV مستقرة إلى حد ما وتسمح بفترة المشتقات لتصحيح الخطأ بكفاءة دون إجراء تغييرات شديدة على FCE أو CO.
MPPT المسؤول عن المراقب المالي
تعتمد خاصية V-I للخلية الكهروضوئية بشكل أساسي على نطاق درجة الحرارة بالإضافة إلى الإشعاع. بناءً على الظروف الجوية ، فإن الجهد الحالي والتشغيل سوف يتغير باستمرار. لذلك ، من المهم للغاية تتبع أعلى PowerPoint لنظام فلطائي ضوئي فعال. تستخدم وحدة التحكم PID لإيجاد MPPT عن طريق إعطاء الجهد الثابت ونقاط التيار إلى وحدة التحكم PID. بمجرد تغيير حالة الطقس ، يحافظ المتتبع على استقرار التيار والجهد.
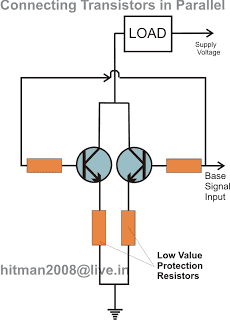
محول إلكترونيات الطاقة
نحن نعلم أن المحول هو أحد تطبيقات إلكترونيات الطاقة ، لذلك يتم استخدام وحدة التحكم PID في الغالب في المحولات. عندما يتحالف محول من خلال نظام يعتمد على التغيير داخل الحمل ، فسيتم تغيير ناتج المحول. على سبيل المثال ، يكون العاكس متحالفًا مع الحمل ، ويتم توفير التيار الضخم بمجرد زيادة الأحمال. وبالتالي ، فإن معلمة الجهد والتيار ليست مستقرة ، ولكنها ستتغير بناءً على المتطلبات.
في هذه الحالة ، ستولد وحدة التحكم هذه إشارات PWM لتنشيط IGBTs للعاكس. بناءً على التغيير داخل الحمل ، يتم توفير إشارة الاستجابة لوحدة التحكم PID بحيث ينتج عنها خطأ n. يتم إنشاء هذه الإشارات بناءً على إشارة الخطأ. في هذه الحالة ، يمكننا الحصول على مدخلات ومخرجات قابلة للتغيير من خلال عاكس مماثل.
تطبيق تحكم PID: حلقة التحكم المغلقة لمحرك DC بدون فرشات
واجهة تحكم PID
يمكن تصميم وحدة تحكم PID وربطها باستخدام متحكم Arduino. في المختبر ، تم تصميم وحدة التحكم PID القائمة على Arduino باستخدام لوحة Arduino UNO ، والمكونات الإلكترونية ، والمبرد الكهروحراري ، في حين أن لغات البرمجة المستخدمة في هذا النظام هي C أو C ++. يستخدم هذا النظام للتحكم في درجة الحرارة داخل المختبر.
تم العثور على معلمات PID لوحدة تحكم معينة ماديًا. يمكن تنفيذ وظيفة معلمات PID المختلفة من خلال التباين اللاحق بين أشكال مختلفة من وحدات التحكم.
يمكن لنظام التفاعل هذا حساب درجة الحرارة بكفاءة من خلال خطأ ± 0.6 بينما يتم تحقيق درجة حرارة ثابتة من خلال اختلاف بسيط عن القيمة المفضلة. ستوفر المفاهيم المستخدمة في هذا النظام تقنيات دقيقة وغير مكلفة لإدارة المعلمات الفيزيائية في النطاق المفضل داخل المختبر.
وبالتالي ، تناقش هذه المقالة نظرة عامة على وحدة التحكم PID والتي تتضمن السجل ، ومخطط الكتلة ، والهيكل ، والأنواع ، والعمل ، وطرق الضبط ، والربط ، والمزايا ، والتطبيقات نأمل أن نكون قادرين على توفير المعرفة الأساسية ولكن الدقيقة حول وحدات تحكم PID. هذا سؤال بسيط لكم جميعا. من بين طرق الضبط المختلفة ، ما هي الطريقة التي يفضل استخدامها لتحقيق التشغيل الأمثل لوحدة التحكم PID ولماذا؟
يُطلب منك التفضل بإعطاء إجاباتك في قسم التعليقات أدناه.
اعتمادات الصورة
مخطط كتلة وحدة تحكم PID بواسطة ويكيميديا
هيكل تحكم PID ، P-controller ، P - استجابة وحدة التحكم ووحدة التحكم PID بواسطة blog.opticontrols
ف - استجابة تحكم بواسطة الضوابط .engin.umich
PI- استجابة تحكم بواسطة لحم
استجابة وحدة تحكم PID بواسطة ويكيميديا
زيجلر نيكولز الجدول الضوابط








{kind=link}
{kind=link}
{kind=link}
{kind=link}