مقدمة موجزة عن الروبوت:
الروبوت هو أي آلة أوتوماتيكية بالكامل ، أي تبدأ من تلقاء نفسها ، وتقرر طريقة عملها وتتوقف من تلقاء نفسها. إنها في الواقع نسخة طبق الأصل من الإنسان ، والتي تم تصميمها لتخفيف العبء البشري. يمكن التحكم فيه هوائيًا أو باستخدام طرق هيدروليكية أو باستخدام طرق التحكم الإلكترونية البسيطة. كان أول روبوت صناعي هو Unimates الذي بناه جورج ديفول وجو إنجلبرجر في أواخر الخمسينيات وأوائل الستينيات.
أي روبوت مبني على 3 قوانين أساسية حددها مؤلف الخيال العلمي الروسي إسحاق أسيموف:
- يجب ألا يؤذي الروبوت الإنسان بشكل مباشر أو غير مباشر.
- يجب أن يطيع الروبوت الأوامر البشرية ما لم ينتهك القانون الأول وحتى ينتهكه.
- يجب أن يحمي الروبوت وجوده بشرط عدم انتهاك القانونين الأولين.

روبوت ثابت
يمكن أن تكون الروبوتات روبوتات ثابتة أو روبوتات متحركة. الروبوتات المتنقلة هي روبوتات ذات قاعدة متحركة تجعل الروبوت يتحرك بحرية في البيئة. أحد الروبوتات المتنقلة المتقدمة هو Line Follower Robot. إنه في الأساس روبوت يتبع مسارًا أو مسارًا معينًا ويقرر مسار عمله الخاص الذي يتفاعل مع عقبة. يمكن أن يكون المسار خطًا أسود على الأرضية البيضاء (مرئيًا) أو مجالًا مغناطيسيًا (غير مرئي). تبدأ تطبيقاتها من الاستخدامات المنزلية الأساسية إلى الاستخدامات الصناعية ، وما إلى ذلك. الحالة الحالية في الصناعة هي أنها تنقل الطرود أو المواد من مكان إلى مكان آخر باستخدام نظام الرافعة. في بعض الأحيان ، قد يتسبب رفع الأوزان الكبيرة في ذلك الوقت في كسر مواد الرفع وسيؤدي إلى إتلاف الطرود أيضًا. يستخدم الخط التالي للروبوتات بشكل شائع لحمل الأطفال عبر مراكز التسوق والمنازل وأماكن الترفيه والصناعات. استخدام السطر التالي مركبة آلية هو نقل المواد من مكان إلى مكان آخر في الصناعات. تعتمد حركة الروبوت هذه تمامًا على المسار. يمكن للروبوت أن يفعل أي شيء تحدده له. كما هو الحال في المصانع ، كل ما عليهم فعله لصنع منتجاتهم هو صنع الإنسان الآلي.

روبوت متحرك
روبوت أتباع الخط
إن روبوت أتباع الخط هو روبوت يتبع مسارًا معينًا يتم التحكم فيه بواسطة آلية التغذية المرتدة.
بناء روبوت أساسي لمتابعة الخط:
يتضمن بناء روبوت تتبع الخط الأساسي الخطوات التالية.
- تصميم الجزء الميكانيكي أو جسم الروبوت
- تحديد حركيات الروبوتات
- تصميم التحكم بالروبوت

روبوت تابع الخط
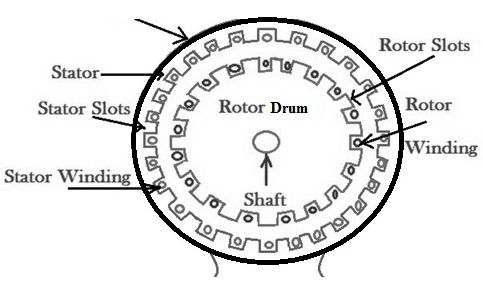
يمكن تصميم الجزء الميكانيكي أو جسم الروبوت باستخدام AutoCAD أو Workspace. يمكن أن يتكون الروبوت الأساسي من أتباع الخط من قاعدة في طرفيها يتم تثبيت العجلات. يمكن استخدام ورقة مستطيلة من البلاستيك الصلب كقاعدة. علاوة على ذلك ، يمكن إضافة جسم صلب مثل الأسطوانة جنبًا إلى جنب مع أجسام أخرى الشكل متصلة ببعضها البعض بواسطة مفاصل ، ولكل منها حركتها المحددة في اتجاه معين. يمكن أن يكون روبوت المتابع الخطي روبوتًا متحركًا بعجلات مع قاعدة ثابتة ، وروبوت متحرك ذو أرجل مع أجسام صلبة متعددة متصلة ببعضها البعض بواسطة مفاصل.
تتضمن الخطوة التالية تحديد حركيات الروبوت. يتضمن التحليل الحركي للروبوت وصف حركته فيما يتعلق بنظام إحداثيات ثابت. يهتم بشكل أساسي بحركة الروبوت وحركة كل جسم في حالة وجود إنسان آلي أرجل. يتضمن بشكل عام ديناميكيات حركة الروبوت. يتم تعيين المسار الكامل للروبوت باستخدام التحليل الحركي. يمكن القيام بذلك باستخدام برنامج Workspace.
التحكم في الروبوت هو أهم جانب في عمله. هنا يشير مصطلح التحكم إلى التحكم في حركة الروبوت ، أي التحكم في حركة العجلات. يتبع روبوت تتبع الخط الأساسي مسارًا معينًا ويتم التحكم في حركة الروبوت على طول هذا المسار عن طريق التحكم في دوران العجلات ، التي يتم وضعها على أعمدة المحركين. لذلك ، يتم تحقيق التحكم الأساسي من خلال التحكم في المحركات. تتضمن دائرة التحكم استخدام المستشعرات لاستشعار المسار و الميكروكونترولر أو أي جهاز آخر للتحكم في تشغيل المحرك من خلال محركات المحركات ، بناءً على خرج المستشعر.
2 طرق للتحكم في روبوت تابع الخط
- بدون استخدام ميكروكنترولر

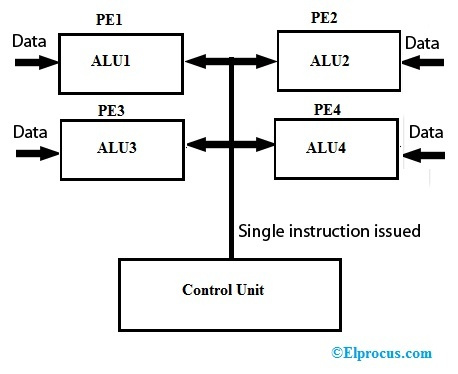
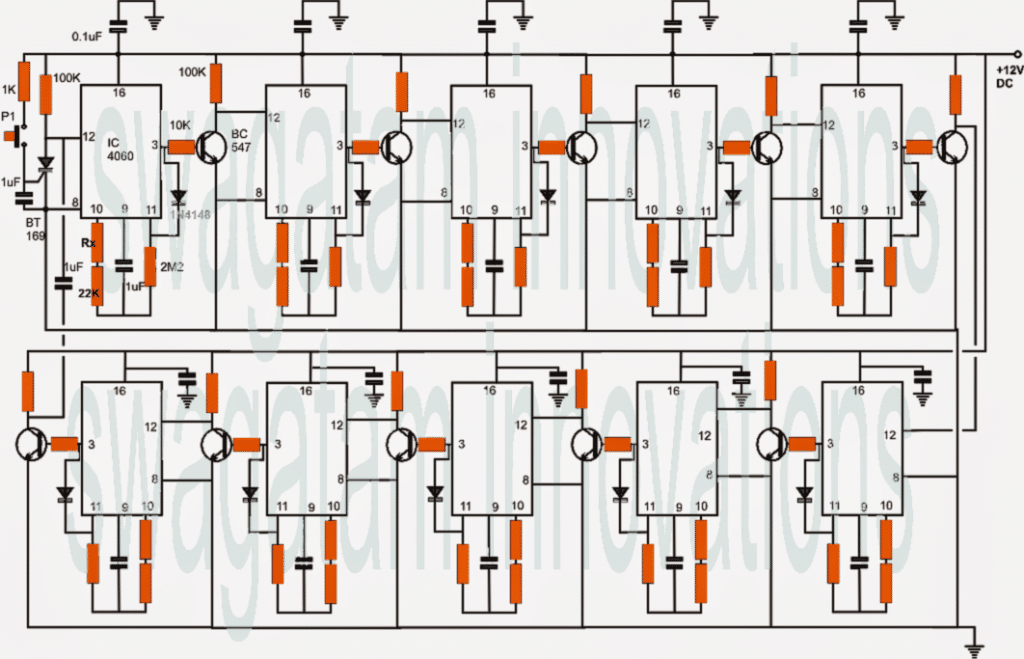
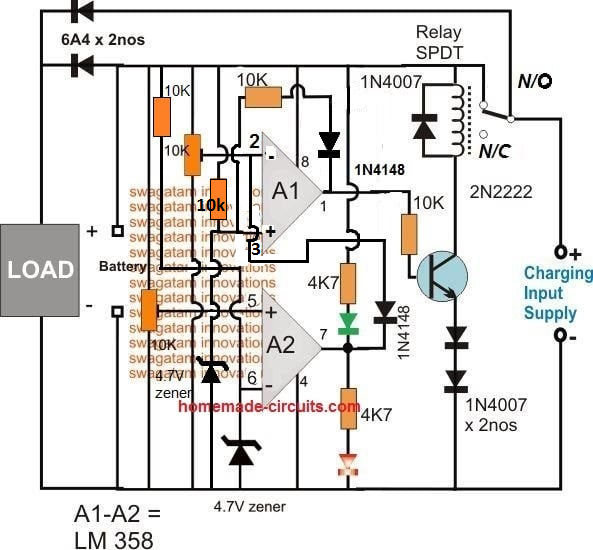
رسم تخطيطي لنظام التحكم
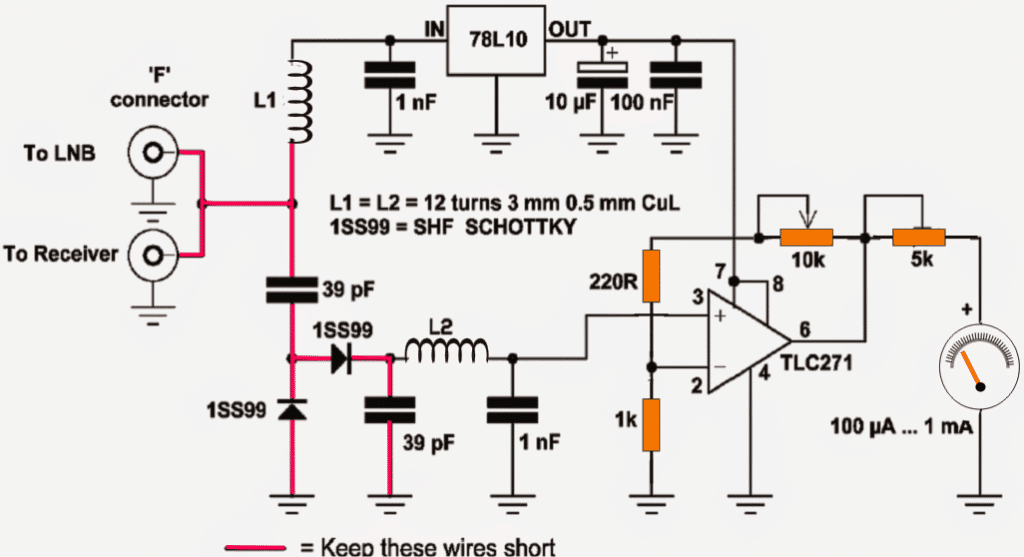
يتكون من ترتيب IR-LED و Photodiode لكل محرك يتم التحكم فيه عن طريق تشغيل وإيقاف الترانزستور.
ينبعث ضوء الأشعة تحت الحمراء IR LED للحصول على التحيز المناسب. ينعكس ضوء الأشعة تحت الحمراء هذا في حالة وجود سطح أبيض ويحدث ضوء الأشعة تحت الحمراء المنعكس على الثنائي الضوئي. تتناقص مقاومة الثنائي الضوئي ، مما يؤدي إلى زيادة التيار من خلاله وبالتالي ينخفض الجهد عبره. يتم توصيل الثنائي الضوئي بقاعدة الترانزستور ونتيجة لزيادة الجهد عبر الثنائي الضوئي ، يبدأ الترانزستور بالتوصيل وبالتالي يحصل المحرك المتصل بمجمع الترانزستور على إمداد كافٍ لبدء الدوران. في حالة وجود لون أسود على المسار الذي يواجهه أحد ترتيب أجهزة الاستشعار ، لا ينعكس ضوء الأشعة تحت الحمراء ويقدم الثنائي الضوئي مزيدًا من المقاومة ، مما يتسبب في توقف الترانزستور عن التوصيل وفي النهاية يتوقف المحرك عن الدوران.
وبالتالي يمكن التحكم في النظام بأكمله باستخدام ترتيب LED-Photodiode-Transistor بسيط.
- مع استخدام ميكروكنترولر
مبدأ العمل:
إن روبوت إراحة الخط هو أحد الروبوتات ذاتية التشغيل. هذا يكتشف ويمنح خطًا مرسومًا على المنطقة. يشار إلى الخط بخط أبيض على سطح كتلة أو خط كتلة على سطح أبيض. يجب أن يكون هذا النظام منطقيًا من خلال الخط. هذا التطبيق يعتمد على أجهزة الاستشعار. نحن هنا نستخدم مستشعرين لغرض اكتشاف المسار. هذا هو مستشعر القرب ومستشعر الأشعة تحت الحمراء. مستشعر القرب المستخدم لاكتشاف المسار ومستشعر الأشعة تحت الحمراء المستخدم لاكتشاف العوائق. تم تركيب هذه المستشعرات في الطرف الأمامي للروبوت. المتحكم الدقيق هو جهاز ذكي يتم التحكم في الدائرة بأكملها بواسطة متحكم دقيق.

رسم تخطيطي للخط التالي للمركبة الآلية المزودة بوحدة تحكم دقيقة
أنواع مختلفة من المركبات الآلية ذات التحكم الخطي:
هناك نوعان من المركبات الآلية التي يتم التحكم فيها عن طريق الخطوط
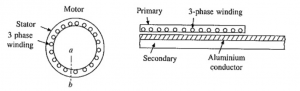
- مركبة روبوتية يتم التحكم فيها عن طريق الخط المتحرك
- مركبة روبوتية يتم التحكم فيها عن طريق التردد اللاسلكي
تطبيقات روبوت أتباع الخط:
- تطبيقات صناعية : يمكن استخدام هذه الروبوتات كناقلات معدات مؤتمتة في الصناعات التي تحل محل أحزمة النقل التقليدية.
- تطبيقات السيارات : يمكن أيضًا استخدام هذه الروبوتات كـ سيارات أوتوماتيكية تعمل على الطرق ذات المغناطيسات المدمجة.
- التطبيقات المحلية : يمكن استخدامها أيضًا في المنازل للأغراض المنزلية مثل تنظيف الأرضيات وما إلى ذلك.
- تطبيقات التوجيه : يمكن استخدامها في الأماكن العامة مثل مراكز التسوق والمتاحف وغيرها لتقديم إرشادات المسار.
مزايا:
- حركة الروبوت تلقائية
- يتم استخدامه لتطبيقات المسافات الطويلة
- بساطة البناء
- نظام الملاءمة والنسيان
- تستخدم في الأتمتة المنزلية والصناعية وما إلى ذلك.