
إلى الروبوت هو آلة كهروميكانيكية يتم توجيهها بواسطة دائرة كهربائية أو برنامج كمبيوتر ، وقد قامت الروبوتات بتبادل البشر للمساعدة في أداء المهام المستمرة والخطيرة التي يختار البشر عدم القيام بها. هدايا يتم تصنيف الروبوتات إلى فئات مختلفة بناءً على ميزاتها وأدائها مثل الروبوتات الصناعية والروبوتات التجارية وروبوتات الخدمة والروبوتات المحمولة. هنا روبوت خدمة يقوم بمهام مستمرة للترحيب بالأشخاص بحركة يدوية تمثل 'ناماستي' من خلال رسالة صوتية مسجلة. بشكل عام ، عندما ندعو الناس إلى المنزل ، والحفلات ، ومناسبات الزواج ، والمكتب ، وما إلى ذلك ، نحتاج إلى ترتيب شخص للترحيب بهم ودعوتهم عند المدخل. إذا كان عدد الأشخاص منخفضًا ، تكون المهمة أبسط. لكن إذا استقبلت مئات الأشخاص ، فستكون المهمة صعبة. للتغلب على هذه المشكلة ، إليك مشروع ، وهو ناماستي روبوت مع التحكم الصوتي.

ناماستي روبوت
ناماستي روبوت مع التحكم الصوتي
المفهوم الرئيسي لهذا ناماستي مشروع الروبوت هو التحكم في محركات المؤازرة المختلفة من خلال لوحة اردوينو. يقوم هذا الروبوت بمسح الأشخاص المحيطين به ويدور رأسه بزاوية 180 درجة. إذا تعرف على أي شخص قريب ، فإنه يتمنى لذلك الشخص مع Namaste مع ضغط كلتا يديه معًا. إنها الطريقة التقليدية لأتمنى الناس في الهند. ال تطبيقات الروبوتات المشاركة في مراكز التسوق والحدائق والمكاتب لجذب الناس.
مخطط كتلة لروبوت Namastae مع التحكم الصوتي
يشير الشكل التالي إلى مخطط كتلة الروبوت ناماستي مع التحكم الصوتي. في هذا النوع من الروبوتات ، تتم برمجة الأوامر الصوتية. يمكن توصيل لوحة التطوير بأكملها بمصدر الطاقة المشترك. وصف كل كتلة كما يلي. ال مزود الطاقة يعطي مصدر الطاقة لجميع الوحدات. تتطلب هذه الوحدات التيار في مللي أمبير ويكون جهد التشغيل 5 فولت.

مخطط كتلة لروبوت Namastae مع التحكم الصوتي
لوحة اردوينو
Arduino هو نوع واحد من الأدوات يعتمد على لوحة تحكم دقيقة بسيطة تستخدم للتحكم والإحساس بالعالم المادي أكثر من كمبيوتر سطح المكتب. للحوسبة الفيزيائية هناك العديد من منصات المتحكم الدقيقة المتاحة. الميزات المهمة في Arduino هي برامج غير مكلفة ومفتوحة المصدر وقابلة للتوسيع. يتوفر برنامج Arduino كأداة مفتوحة المصدر ويمكن توسيع اللغة من خلال مكتبات C ++.

لوحة اردوينو
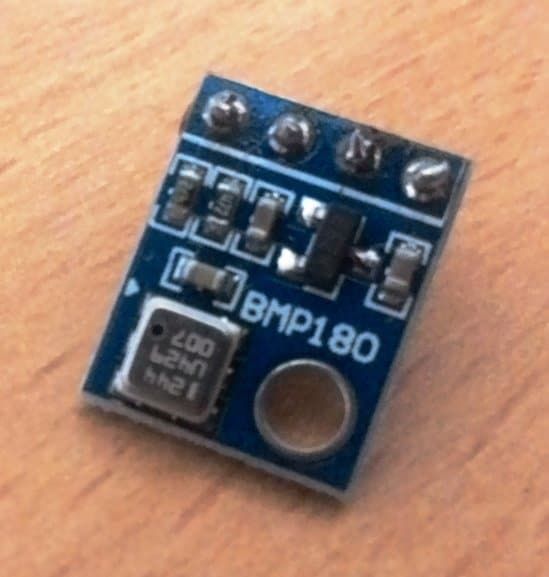
جهاز استشعار بينغ
يستخدم مستشعر ping جهاز SONAR للتحكم في مسافة الجسم في المنطقة المجاورة له. هذه جهاز الاستشعار يستخدم عيني الروبوت لاستشعار العائق ، على سبيل المثال ، مستشعر القرب. إنه يعطي دقة نطاق ممتازة وقراءات مستقرة. لا يتأثر تشغيل هذا المستشعر بالمواد السوداء أو ضوء الشمس. مواصفات مستشعر ping هي الجهد 5V ، التيار 15mA ، زاوية المستشعر ليست> = 15 ومسافة الكشف 2 سم ~ 450 سم.

جهاز استشعار بينغ
يتم عرض واجهة مستشعر ping مع Arduino أدناه. هناك أربعة دبابيس متاحة لواجهة مستشعر ping مع لوحة Arduino. الدبابيس الأربعة الموجودة على لوحة Arduino هي GND و VCC و ECHO و TRIGGER. المسامير الموجودة على اللوحة هي D0-D13 ، في أن 12 و 13 دبابيس هي دبابيس إدخال وإخراج.
يوفر لنا متحكم Arduino مكتبة تحكم مؤازرة تتيح لنا تبديل الماكينات بسهولة. في هذا المشروع ، استخدمنا 5 أجهزة لتنظيم حركات روبوت ناماستي مثل الرأس ، الكوع الأيمن ، الكوع الأيسر ، الكتف الأيمن والكتف الأيسر. هنا ، تشير دبابيس الإدخال / الإخراج الرقمية (D5 ، D6 ، D9 ، D10 ، D1) في لوحة Arduino الموصولة بمحركات مؤازرة.
تشغيل الصوت IC
يوفر IC لتشغيل الصوت هذا الرسالة المسجلة التي يتم تشغيلها بمعدل التردد المحدد مسبقًا. يتم نقل التشغيل إلى وحدة تضخيم الصوت.

تشغيل الصوت IC
تناوب
إلى التتابع هو نوع واحد من التبديل يعمل كهربائيا. يصنع تدفق التيار عبر ملف الترحيل مجالًا مغناطيسيًا يدعو ذراعًا ويغير اتصالات التبديل.

تناوب
التحكم الصوتي روبوت ناماستي يعمل
يمكن عمل روبوت ناماستي خطوة بخطوة مع نتائج المحاكاة. عندما يكون روبوت ناماستي في الحالة الأولى ، إذن محرك سيرفو s من الروبوت 2 ، 3 ، 4 ، 5 في حالة إيقاف أو حالة صفر. يتناوب رأس روبوت ناماستي من المركز إلى اليمين واليسار ثم إلى الخلف إلى المركز بسبب دوران محرك سيرفو 1 من 0 درجة إلى 180 درجة. تحدد حركة رأس الروبوت أن روبوت ناماستي يبحث عن عقبة. عندما يكتشف مستشعر ping أي عقبة ، يعود موضع رأس الروبوت إلى المركز وبقايا المحرك المؤازر 1 بزاوية 90 درجة ويتم إيقاف تشغيله. يتم تنشيطه في حالة منخفضة.
عندما يتم إيقاف تشغيل محرك سيرفو 1 ، يتم تشغيل المحركات المتبقية مثل servo4 و servo5. يتم تشغيل خط الإشارة للكتفين الأيمن والأيسر لروبوت ناماستي. الآن يمكن أن تشكل أيدي الروبوت الحركة. يتم توصيل محركات مؤازرة الكتف بمنافذ الإدخال والإخراج الرقمية للوحة Arduino. ولكن ، ستكون خطوط الإشارة أو هذه المسامير عالية ويتم تغيير موضع المؤازرة إلى 90 درجة. الآن يتم إيقاف تشغيل servo4 و servo 5.
أخيرًا يمكننا أن نستنتج أن الهدف الرئيسي من هذا التحكم الصوتي الروبوت هو تقديم الخدمة في الترحيب بالناس بأدب من خلال رصد الأشخاص الذين يمشون أمامه. يمكن استخدامه في أماكن عامة مختلفة مثل الحدائق ومراكز التسوق والحفلات وما إلى ذلك. نأمل أن يكون لديك فهم أفضل لهذا المفهوم. علاوة على ذلك ، فإن أي استفسارات تتعلق بهذا المفهوم أو تستند إلى اردوينو مشاريع الروبوت ، يرجى تقديم اقتراحاتكم القيمة من خلال التعليق في قسم التعليقات أدناه.
اعتمادات الصورة:
- لوحة اردوينو نياكأخبار وآراء
- جهاز استشعار بينغ المنظر
- تشغيل الصوت IC كيلاب
- تناوب غير مباشر
- ناماستي روبوت canstockphoto






{kind=link}
{kind=link}
{kind=link}
{kind=link}