مع تطور التقنيات خاصة في التكنولوجيا الروبوتية ، أصبحت الروبوتات هي السائدة في العديد من التطبيقات. بعضها من نوع شديد الخطورة ومناطق خطرة. تعمل التطبيقات العسكرية وتطبيقات ساحة المعركة الآن على زيادة استخدامها للروبوتات في بعض المهام الحاسمة والمعقدة. في إحدى مقالاتي ، وصفت استخدام الروبوتات كجاسوس في العمليات العسكرية. الآن ، ماذا لو كانت هناك حاجة للدفاع عن السيارة الآلية أو هجوم من الروبوت؟ هذا هو المكان الذي تأتي فيه الحاجة إلى روبوت مدمج بآلية هجوم. أحد الأمثلة على ذلك هو السيارة الآلية المزودة بمسدس ليزر.

مركبة روبوتية يتم التحكم فيها بترددات الراديو مع ترتيب شعاع الليزر
يستخدم هذا الروبوت بشكل أساسي في العمليات العسكرية وأيضًا بواسطة شرطة المرور لاكتشاف سرعة المركبات المتحركة.
قبل الانتقال إلى التفاصيل حول الروبوتات المزودة بمسدسات ليزر ، دعنا نفهم سريعًا استخدام الليزر كسلاح.
شعاع الليزر (تضخيم الضوء بواسطة الانبعاث التحفيزي) هو ضوء أحادي الاتجاه شديد التركيز على عكس الضوء من لمبة بسيطة. يتكون من قاع وقمم متزامنة ، أي أن الموجات لا تتداخل مع بعضها البعض. ينتج عن هذا ضوء شديد التركيز بقوة عالية جدًا من 1000 إلى 1 مليون مرة أكبر من مصباح المصباح النموذجي. إنه جهاز يتحكم في انبعاث وامتصاص الفوتونات عن طريق ضخ كميات كافية من الطاقة. في هذا ، يتم تضخيم مصدر الفوتونات في شعاع من الضوء. يتنوع الطول الموجي لهذه الليزرات إلى أطياف مختلفة مثل الأشعة المرئية والأشعة تحت الحمراء والأشعة فوق البنفسجية.
يدور المبدأ الكامن وراء الليزر حول ثلاثة أشياء هي الامتصاص ، والانبعاث التلقائي ، والانبعاثات المحفزة. تتفاعل كمية كافية من الطاقة من الفوتون مع الذرة ، مما يتسبب في انتقال الذرة من حالة طاقة منخفضة إلى حالة طاقة أعلى. تعود هذه الذرة إلى حالة الطاقة المنخفضة عن طريق إصدار فوتون يسمى الانبعاث التلقائي. في الانبعاث المستحث هو إطلاق الطاقة من الذرة بوسائل اصطناعية. لذلك يتفاعل الفوتون مع الذرة المثارة ، ولديه نفس الطاقة والاستقطاب مثل الفوتون الساقط.
الآن دعونا نلقي نظرة على أجزاء الأجهزة في الروبوت
- يتمركز: يمكن أن تكون قاعدة مثل هذا الروبوت أي جسم تكعيبي به عجلات متصلة بحركته.
- محرك بتيار مستمر: يتكون الروبوت من محركي تيار مستمر يتم تشغيلهما بواسطة محركات المحرك ويوفر الحركة المطلوبة للروبوت.
- وحدة التحكم: يتم التحكم في حركة الروبوت باستخدام وحدة اتصالات RF. يتكون جهاز الإرسال من أزرار ضغط ووحدات تحكم دقيقة ووحدة فك ترميز وجهاز إرسال RF بينما تتكون وحدة الاستقبال المدمجة في الروبوت من وحدة تشفير ووحدة مستقبل RF للتحكم في حركة آلية .
- مسدس ليزر: يتم تركيب مسدس ليزر على الروبوت الذي يؤدي المهمة الرئيسية للروبوت.
نظرة خاطفة على عمل الروبوت
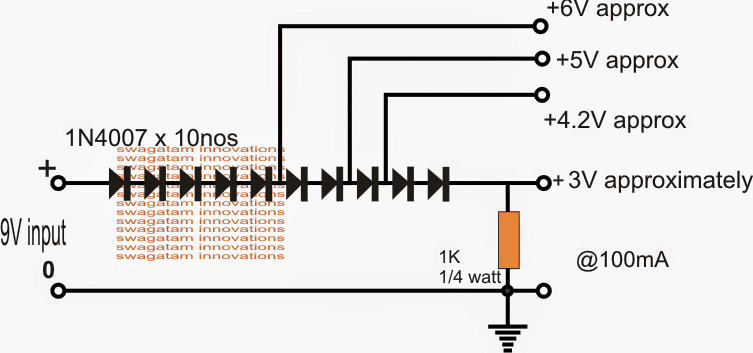
يقوم الروبوت أثناء التحرك في الاتجاه المطلوب بإطلاق شعاع ضوء قوي من مسدس الليزر والذي يمكن أن يلحق الضرر بالهدف أو ينتج عنه بقعة لاكتشاف الهدف. يحتاج الليزر إلى أن يكون مدفوعًا ببعض مصادر الطاقة. في تصميم نموذج أولي بسيط باستخدام قلم ليزر أساسي ، يتم تشغيل الجهاز بواسطة ترانزستور يعمل كمفتاح. يستقبل الترانزستور الإشارة المنطقية المنخفضة من وحدة التحكم الدقيقة وهو في حالة إيقاف تشغيل ، مما يجعل وحدة الليزر متصلة مباشرة بمصدر الطاقة 5 فولت.

مسدس ليزر يعمل بالترانزستور كعاكس
السيطرة على الروبوت
للتحكم في حركة الروبوت ، يجب التحكم في تشغيل المحركات. يمكن القيام بذلك باستخدام عملية تحكم RF لسائقي المحركات. يتم إرسال الأوامر باستخدام جهاز إرسال RF على مسافة 200 متر تقريبًا ويتم استقبالها بواسطة جهاز استقبال التردد اللاسلكي لقيادة المحركات.
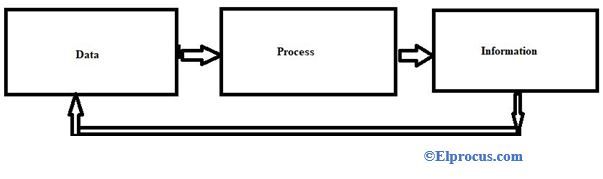
تتكون وحدة الإرسال من عدة أزرار ضغط تعمل كمفاتيح أوامر لتحريك الروبوت في أي اتجاه مرغوب. يتم ربط الأزرار الانضغاطية بالميكروكونترولر ، المبرمج لإرسال البيانات في شكل متوازي بناءً على إدخال زر الضغط ، إلى المشفر. يحول المشفر هذه البيانات المتوازية إلى نموذج تسلسلي ويتم إرسال هذه البيانات التسلسلية باستخدام وحدة إرسال التردد اللاسلكي عبر هوائي.

رسم تخطيطي يوضح قسم جهاز الإرسال
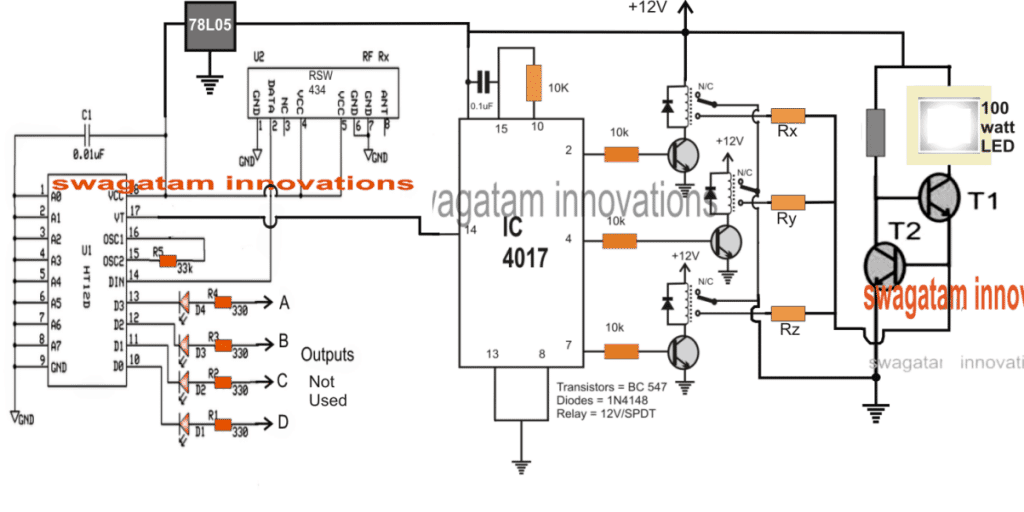
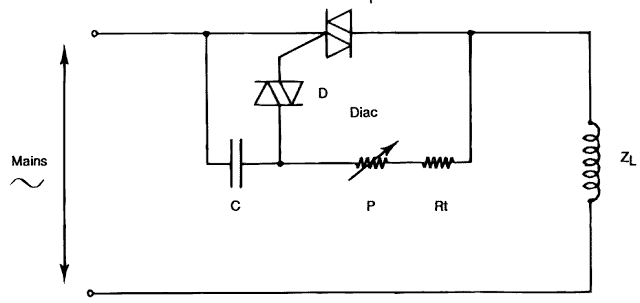
تتكون وحدة الاستقبال من وحدة مستقبل RF التي تستقبل الإشارة المعدلة وتزيل تشكيلها. يستقبل مفكك الشفرة الإشارة المُزالة التشكيل في شكل تسلسلي ويحولها إلى الشكل المتوازي. يستقبل الميكروكونترولر الإشارات ويتحكم في سائق المحرك وفقًا لذلك. محرك المحرك المستخدم في LM293D والذي يمكنه التحكم في محركين في وقت واحد.

رسم تخطيطي يوضح قسم المستقبل
وبالتالي باستخدام الاتصالات اللاسلكية يمكننا التحكم في الروبوت.
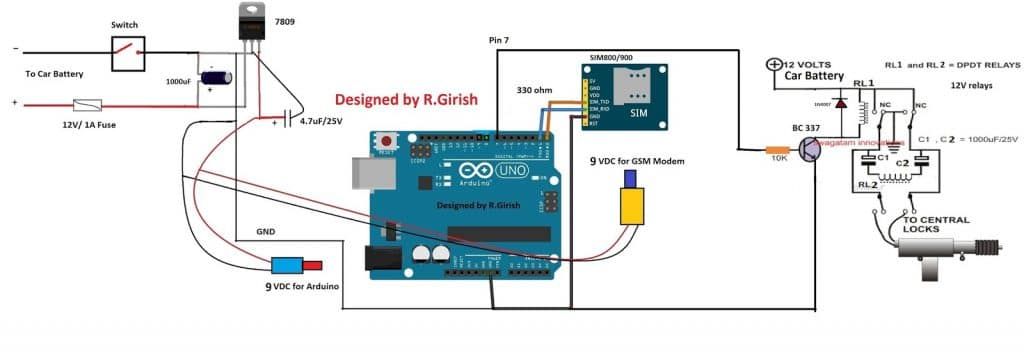
في الأوصاف أعلاه ، قدمت فكرة موجزة عن نموذج أولي بسيط لمركبة آلية ذات شعاع ليزر. في تطبيقات الحياة الواقعية ، تُستخدم عادةً أنظمة الاتصالات بعيدة المدى مثل GSM أو DTMF للتحكم في الروبوت من الأماكن البعيدة.
3 تطبيقات للمركبة الروبوتية بمسدس الليزر:
- كشف الهدف : يمكن للمركبة الآلية استخدام شعاع الليزر لإحداث بقعة على الهدف ، بحيث يمكن رؤيتها بسهولة ويمكن استهدافها. مثال على ذلك هو الليزر المحمول جوا.
- الهدف تدمير : قوي شعاع الليزر من أجل تردد 95 جيجاهرتز يمكن أن يسبب إحساسًا حارقًا في جسم الإنسان لأنه يخترق الجلد بمقدار 1/64ذمن شبر واحد ويمكن لشعاع الطاقة تسخين جزيئات الماء في الجسم. مثال على ذلك هو نظام الرفض النشط الذي طورته الولايات المتحدة الأمريكية.
- الهدف المدى الباحث وكشف السرعة : يمكن استخدام شعاع الليزر من السيارة الآلية للعثور على نطاق الهدف من خلال مبدأ انعكاس ضوء الليزر وأيضًا يمكن حساب سرعة الهدف بمجرد أن نحصل على النطاق.
حتى الآن لدينا فكرة موجزة عن استخدام الروبوتات لكاشف الهدف والمدمرة. هل له أي فائدة للجمهور العادي بخلاف الجيش فقط؟ فكر ثم اجب.